Category: Uncategorized



Video on “Probabilistic Surface Friction Estimation Based on Visual and Haptic Measurements”

Watch the video demonstration of our latest paper on friction coefficient estimation
Safe Model Predictive Control
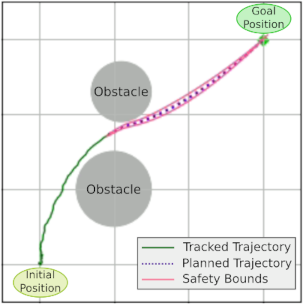
Safe Model Predictive Control (Safe MPC) aims to ensure that a physical system’s safety constraints are satisfied with high probability. Our research is on extending constrained MPC methods to cope with probabilistic safety constraints. We further research modeling uncertainty of dynamics to ensure safe exploration when combined with safety constraints learned in simulation, and learning powerful data-efficient surrogate models for complex dynamics.
Hypermaps: Closing the complexity gap in robotic mapping
Hypermaps aim at improving how robots manage data about the environment they inhabit.
Bio-mimetic multipoint contact sensing
Tactile sensors have been primarily used to improve the agile manipulation capabilities of the robots. As opposed to previous efforts, the aim of this research is to be able to develop a reproducible and open-source multi-point tactile sensor array. In doing so, we aim to develop a sensor array that can provide an array of […]
Human-inspired navigation for robots
Humans possess the innate ability to navigate from one location to another and orient themselves to avoid getting lost in the process. Studies from rodents and other model species have provided unprecedented insights into the potential neural correlates of mammalian spatial cognition. Yet, those correlates have so far revealed little about applicable principles of navigational […]
Decision-Making in Autonomous Driving with Data- and Model-Based Methods Combination Ensuring Road Safety Aspects

In addition to transportation comfort and efficiency, autonomous vehicles provide a vital improvement in traffic safety by minimizing impact of human factor. In this project, the data- and model-based approaches will be combined to develop a safety-oriented decision-making algorithm for autonomous driving systems. The main assessment criteria for the vehicle performance actuation is traffic safety, […]
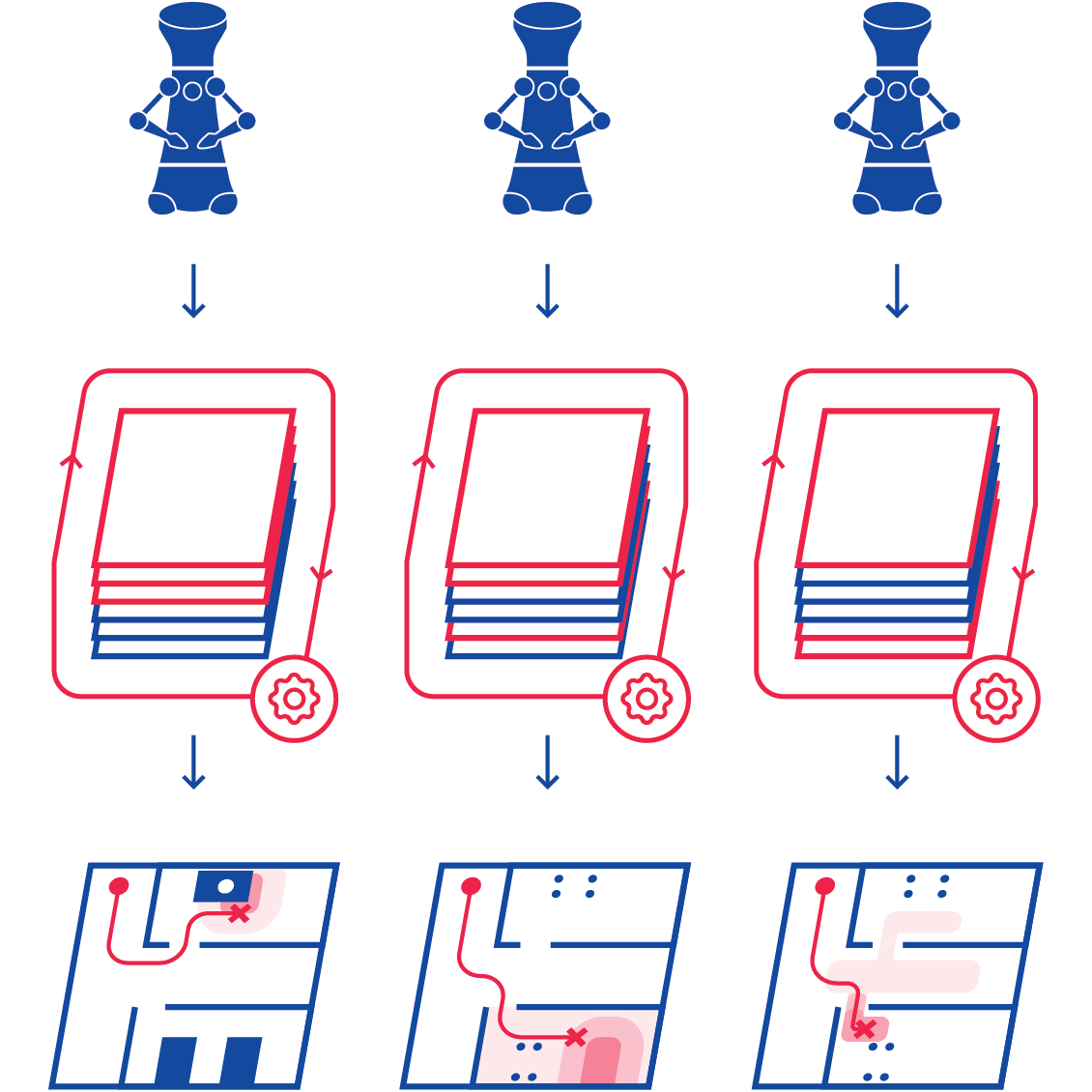
Occupancy Uncertainty Maps

In this project we research how to build maps which include the uncertainty of the robot over the occupancy of the objects in the environment.
We have shown how the constructed maps can be used to increase global navigation safety by planning trajectories which avoid areas of high uncertainty, enabling higher autonomy for mobile robots in indoor settings.