Category: Deformable Object Manipulation
Interactive Identification of Granular Materials using Force Measurements
To be updated. The code and dataset available at https://github.com/samhyn/granular_identification.
Our work “QDP: Learning to Sequentially Optimise Quasi-Static and Dynamic Manipulation Primitives for Robotic Cloth Manipulation” was accepted to IROS 2023!
We are happy to announce that our work “QDP: Learning to Sequentially Optimise Quasi-Static and Dynamic Manipulation Primitives for Robotic Cloth Manipulation” was accepted to IROS 2023.
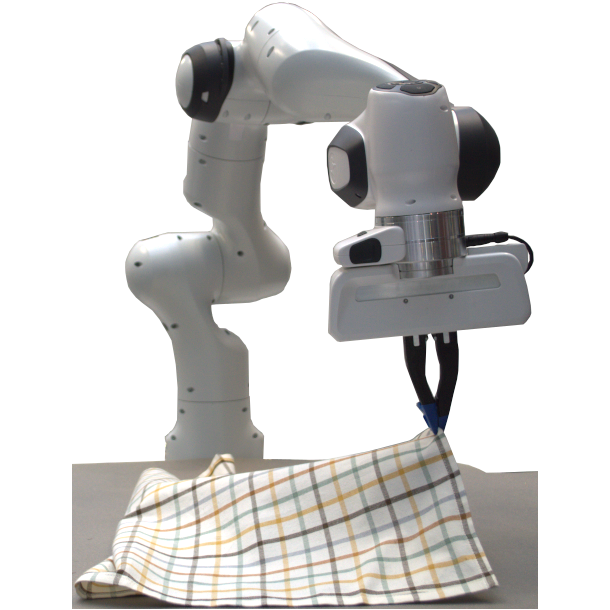
Participation at the ICRA’23 Cloth Manipulation Challenge
We participated at the Cloth Manipulation and Perception Track at the IEEE ICRA 2023 Robotic Grasping and Manipulation Competition.
Our work “Learning Visual Feedback Control for Dynamic Cloth Folding” was accepted to IROS 2022!

We are happy to announce that our work “Learning Visual Feedback Control for Dynamic Cloth Folding” was accepted to IROS 2022 and nomitated to both the IROS Best Paper award, Best Student Paper award and the IROS Best RoboCup Paper Award.
Manipulation of Granular Materials by Learning Particle Interactions

In this work we propose to use a Graph Neural Network (GNN) surrogate model to learn the particle interactions of granular materials. We perform planning of manipulation trajectories with the learnt surrogate model to arrange the material into a desired configuration.
Evolving-Graph Gaussian Processes poster at the Time Series Workshop at ICML 2021
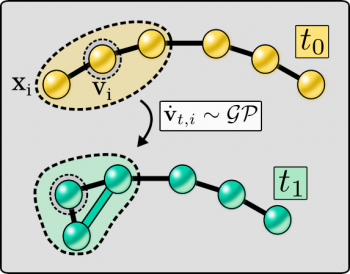
This work extends the current SotA of Graph Gaussian Processes (GGPs) to dynamic graphs and asses the performance of the proposed evolving-Graph Gaussian Process (e-GGP) in two simulated tasks where deformable objects are represented as a graph that evolves over time.