Equipment and robots
| The Hello Robot Stretch 2 The Stretch 2 is a mobile manipulator that combines the capabilities of a mobile base with a highly capable arm that can perform precision manipulation and grasping tasks. Its flexible and autonomous navigation allows it to navigate indoor environments, such as warehouses and factories, with ease and efficiency. |  |
| Care-O-bot 4 Care-O-bot 4 is the product vision of a mobile robot assistant to actively support humans in domestic environments. The meanwhile fourth generation of this successful development series is more agile and modular than its predecessors and offers various ways of interaction. The enhanced agility of Care-O-bot 4 is owed to the patented spherical joints around discreet pivot points on its neck and hips. They extend the robot’s working space and allow 360 degree rotations of head and torso. |  |
| Franka Emika Panda Franka Emika Panda is a collaborative robot arm, developed by FRANKA EMIKA. The « Research » version allows its user to have a direct control and the possibility to program the robot, but also interface the robot with external sensors (C++, ROS and MoveIt! packages available online). | 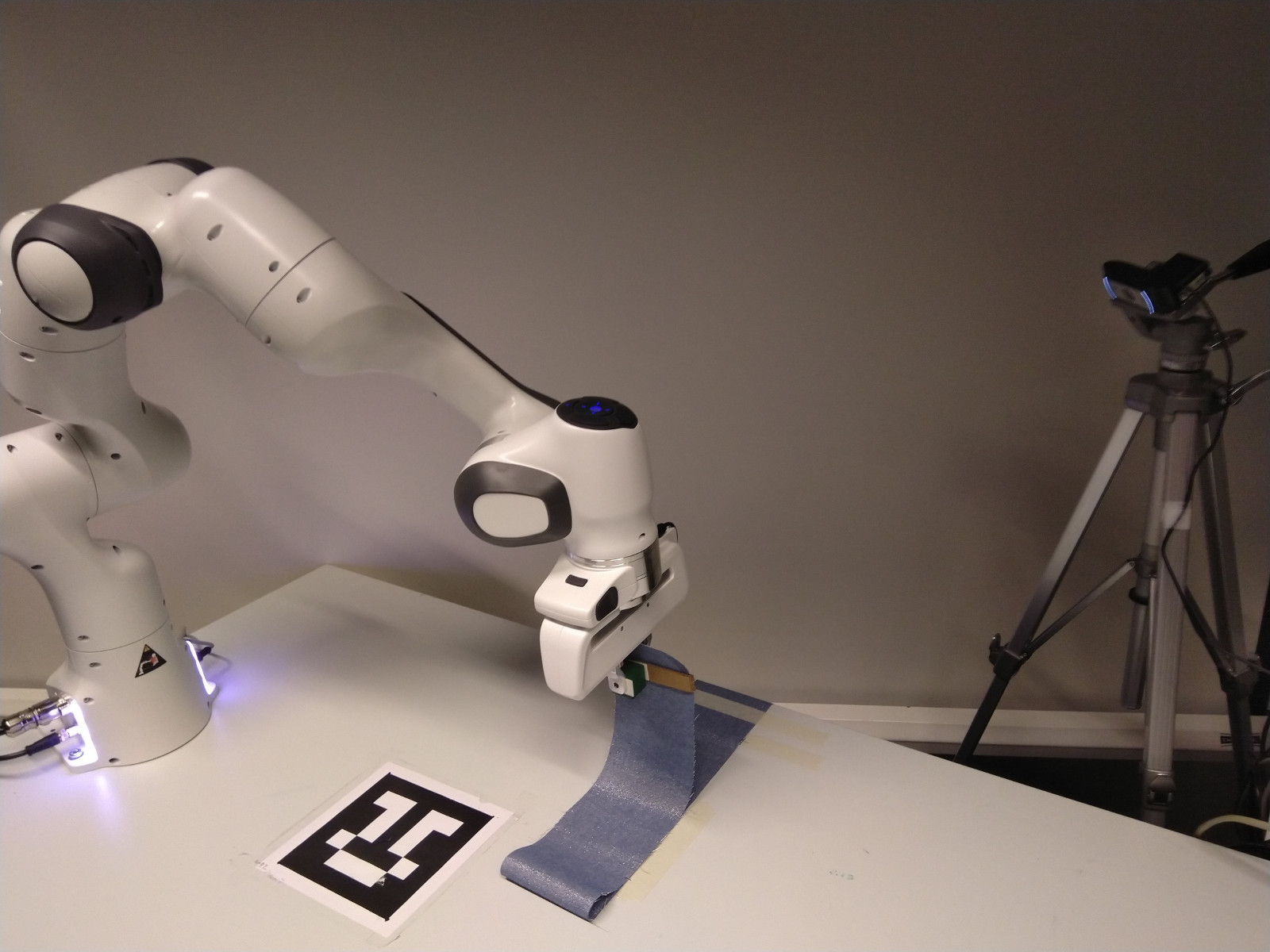 |
| TurtleBot 3 Waffle Pi Turtlebot is a ROS standard robot platform. TurtleBot3 is a small, affordable, programmable, ROS-based mobile robot for use in education, research, hobby, and product prototyping. The goal of TurtleBot3 is to dramatically reduce the size of the platform and lower the price without having to sacrifice its functionality and quality, while at the same time offering expandability. | 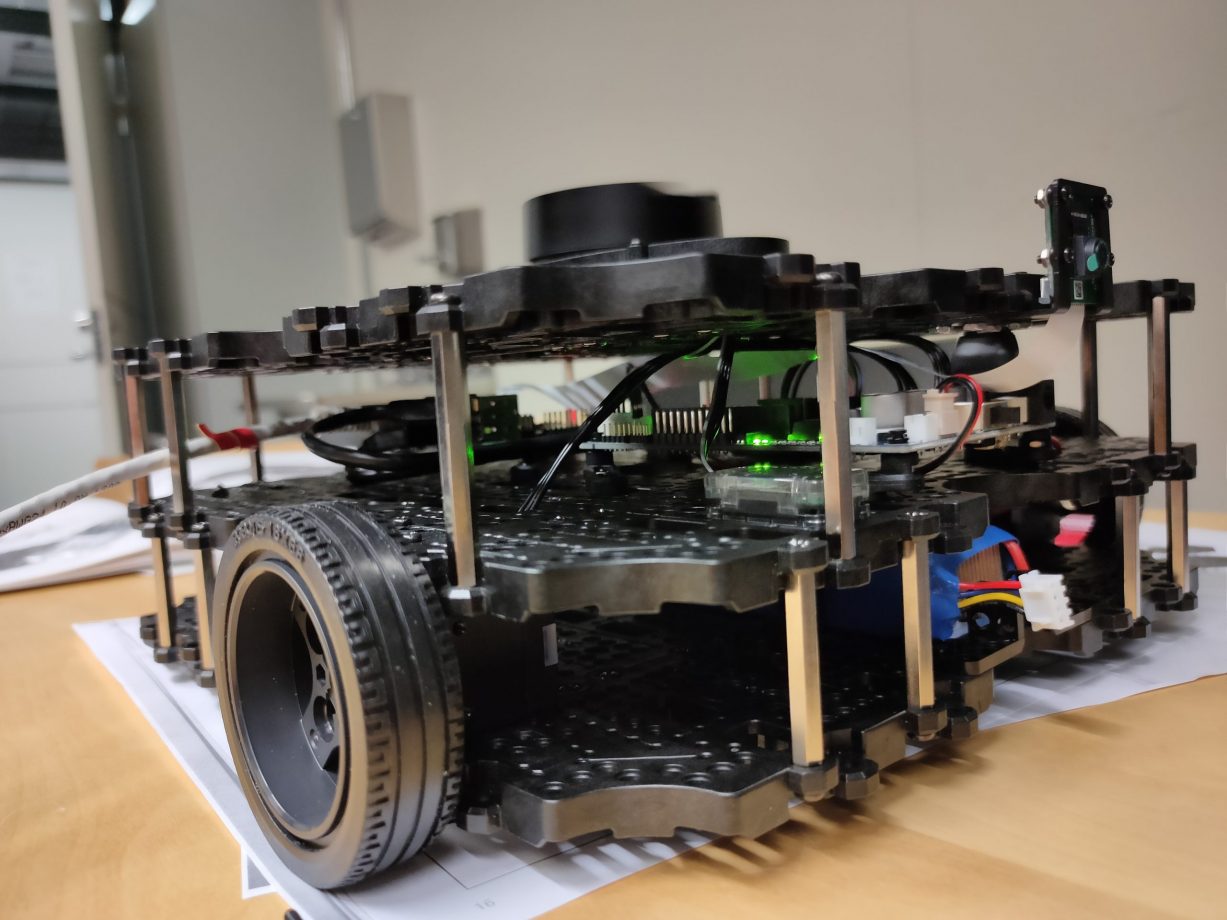 |
| BH8-282 BarrettHand BH8-282 BarrettHand is a low-weight 3-fingered programmable grasper, with a payload of 6 Kg. Its fingers can be dynamically reconfigured, thus allowing selection among multiple grasping modalities (see figure). Each finger has two joints, one motor and one torque sensor. Tactile sensors measure local pressure at palm and fingertips. | 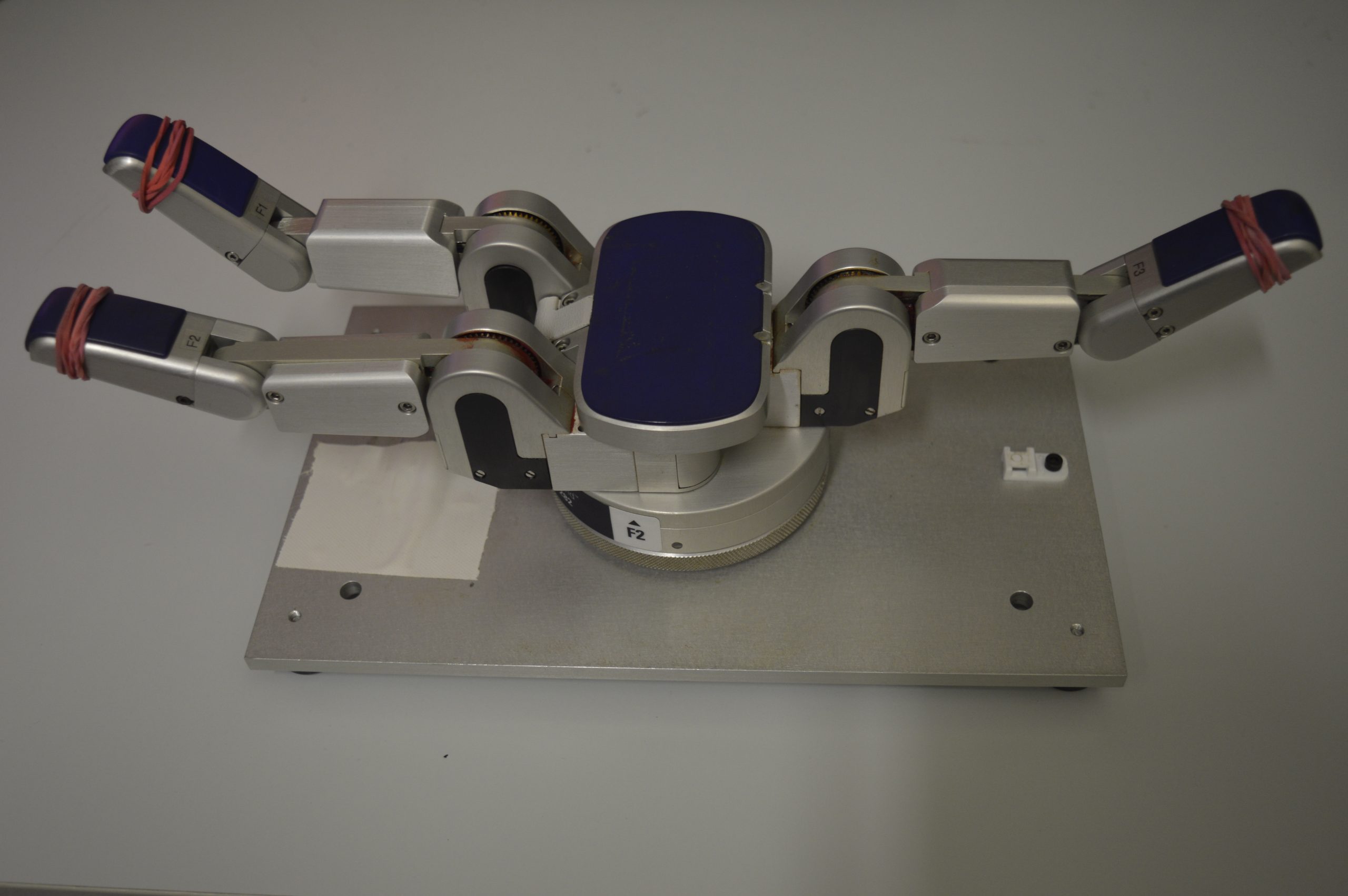 |
| Kinova JACO robotic arm JACO, Kinova’s Advanced Manipulator Arm is a versatile 6 degrees of freedom robotic arm, which can lift an object up to 1.5 kg and has a reach of 90 cm. The gripper consists of 3 individually controlled underactuated fingers, which allow easily and safely handle variety of objects. | |
| Nao humanoid robot NAO is a programmable, 57-cm tall humanoid robot developed by Aldebaran Robotics. Its body consists of 25 degrees of freedom. It is equipped by the sensor network, including 2 cameras, 4 microphones, sonar rangefinder, 2 IR emitters and receivers, 1 inertial board, 9 tactile sensors, and 8 pressure sensors. |  |
{kind=link}