Funding
The group is collaborating actively with major research partners. Through previous and current European projects, the group has an extensive collaboration network with partners around Europe.
On-going Projects
Hypermaps
Duration: 2023-2027
Funded by: Academy of Finland
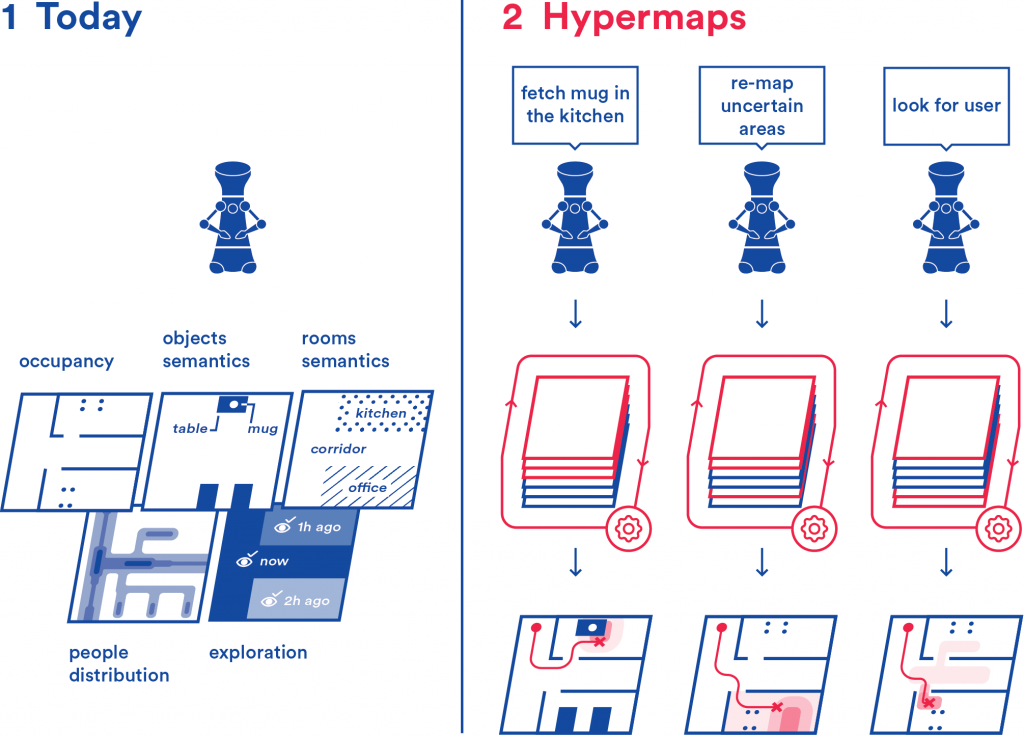
Hypermaps improves how robots manage data about the environment they inhabit. The most common way for robots to handle environmental information is by using maps.
Hypermaps simplifies the way robots access maps and helps them correlate information from different maps. This enables robots to increase their ability to understand the world around them, perform more advanced tasks than what they can today, better understand user requests, and autonomously correct their knowledge about the environment. The research is conducted in Aalto University, in collaboration with University of Bonn, Technical University of Munich, KONE ltd, and GIM Robotics.
Past Projects
LASSO
Duration: 2023-2024
Funded by: Wallenberg AI, Autonomous Systems and Software Program
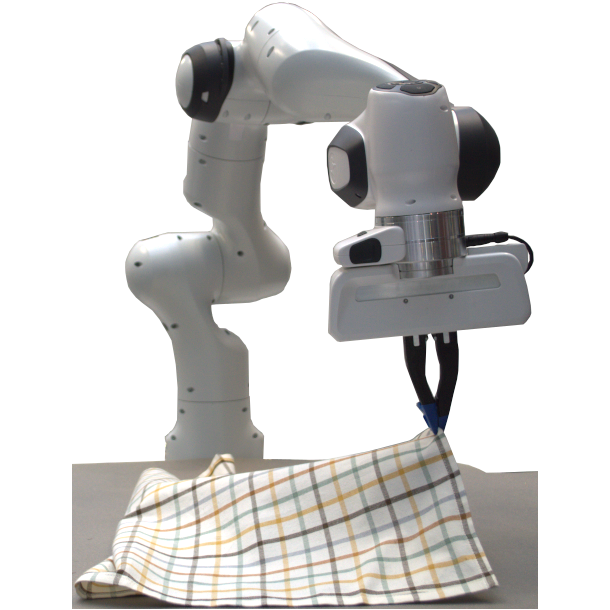
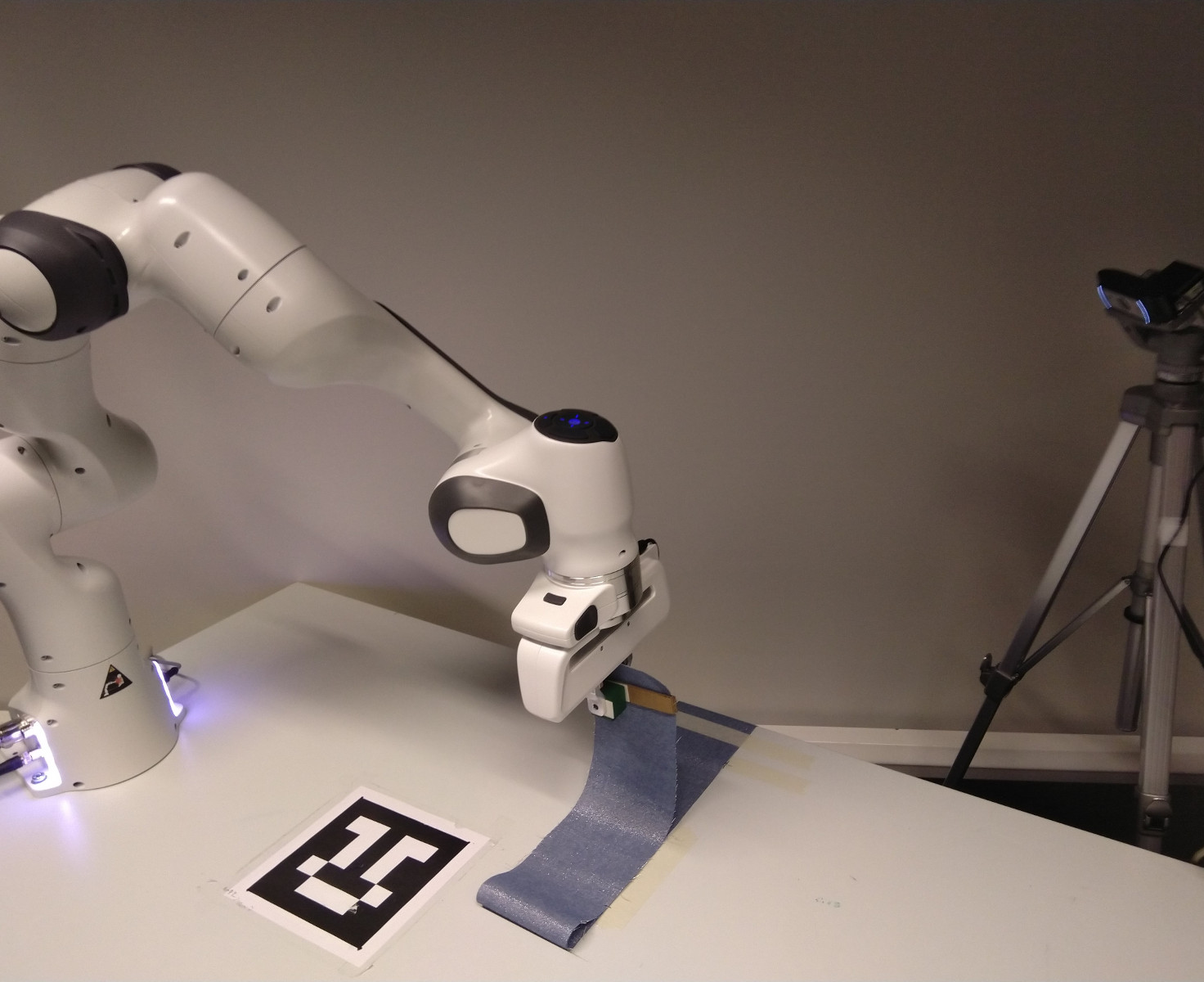
The Latent space servoing for autonomous manipulation of deformable objects (LASSO) aims to develop methods for autonomous manipulation of deformable objects via learning low-dimensional approximate representations for the object configurations and employing feedback control in the space of those representations. Specifically, the project focuses on developing methods for cloth manipulation use cases such as assistive dressing, bag filling, etc.
The role of the Intelligent Robotics group in this project is to develop data driven methods for learning low-dimensional latent space dynamics of deformable objects and designing real-time feedback based controllers for deformable object manipulation.
AISA
Duration: 2023-2024
Funded by: Wallenberg AI, Autonomous Systems and Software Program
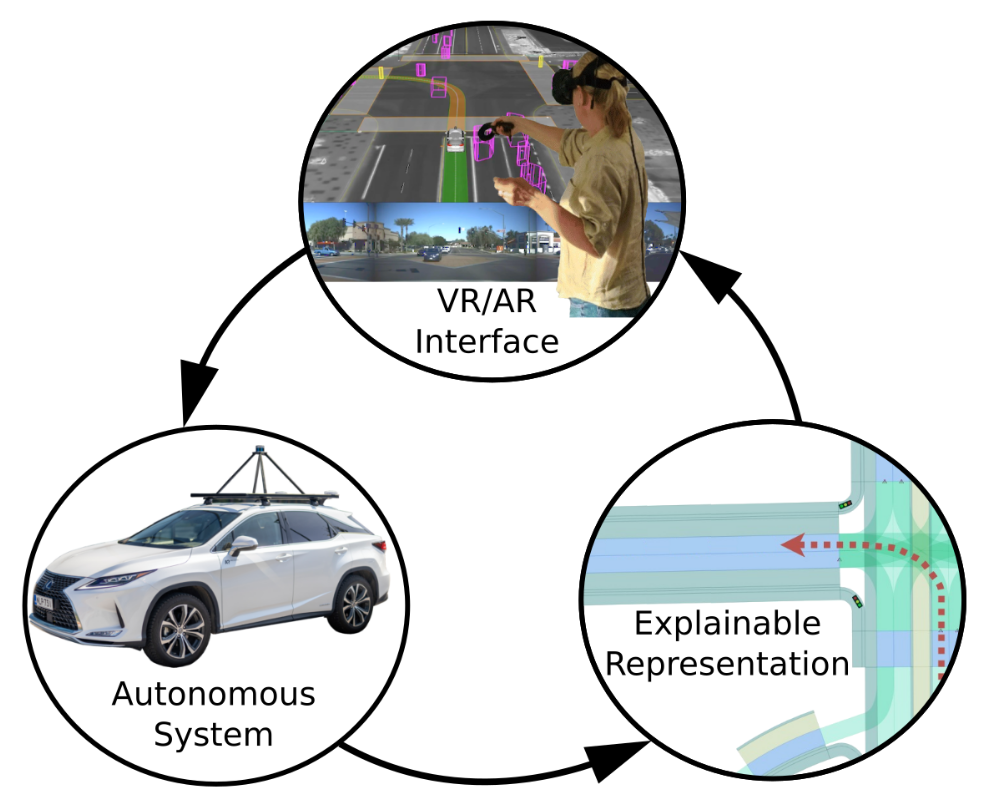
The AISA (AI-powered Situational Awareness) project aims to improve situational awareness for operators of autonomous systems to resolve complex situations in which the system has to yield control back to a human operator. In such situations an operator needs to quickly acquire all relevant information about the situation, but the amount of data that needs to be processed might be overwhelming for a human to make a timely decision.
The role of the Intelligent Robotics group in the project is to develop methods that are able to explain the decisions of the autonomous system and to choose potentially relevant data to allow the human to resolve the situation.
AI4LessAuto
Duration: 2022-2024
Funded by: Academy of Finland
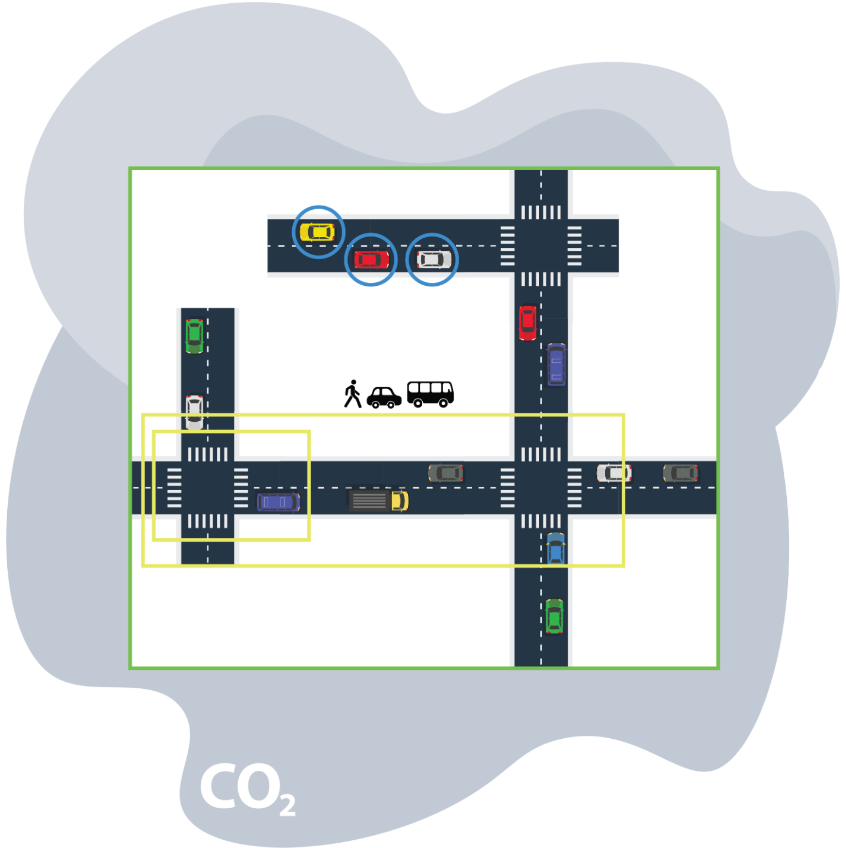
The Artificial Intelligence for Urban Low-Emission Autonomous Traffic (AI4LessAuto) project brings together atmospheric and computer scientists and traffic engineers in active dialogue with municipal stakeholders with the ultimate aim to understand how autonomous electrified traffic should be organized during the transition period in order to reduce CO2 emissions. This is achieved by i) building a framework of computational modelling tools to evaluate the CO2 emissions originating from electrified automated vehicles, and ii) developing artificial intelligence based control from vehicle-level to city-center wide traffic-level in which CO2 emissions are minimized.
The role of the Intelligent Robotics group in this project is to develop methods to answer the question, what level of emission reduction can be gained if control of autonomous vehicles is optimized based on minimizing emissions on the level of single vehicles and local fleets.
MAMAA
Duration: 2022-2024
Funded by: Academy of Finland
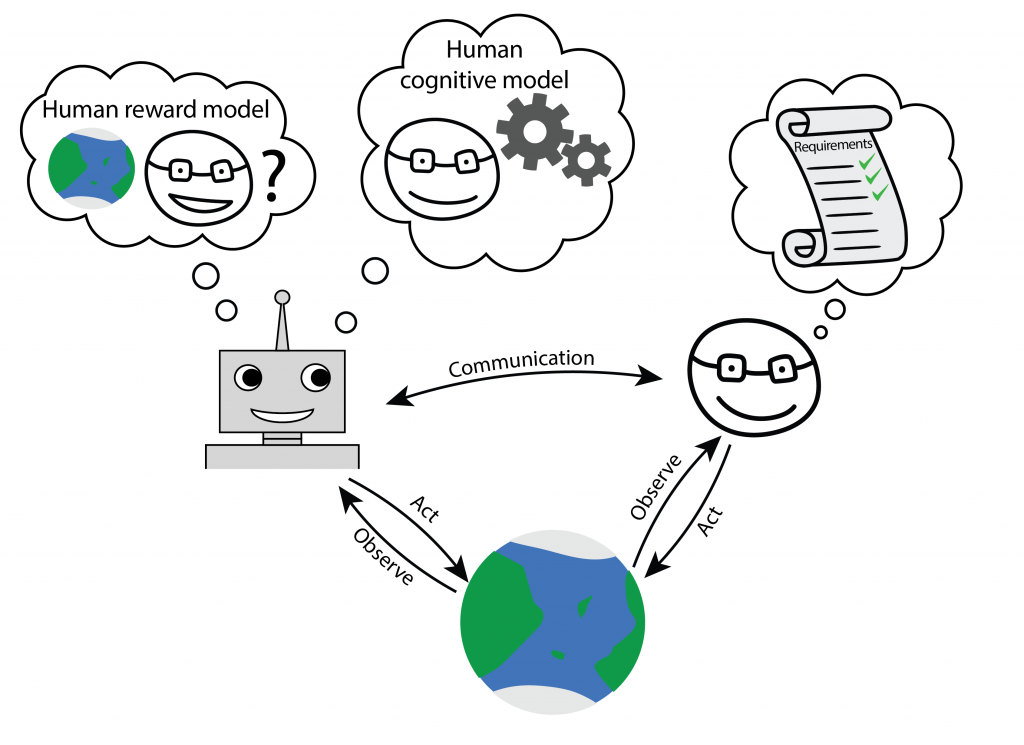
The Maximally Autonomous AI Assistant (MAMAA) project aims to develop artificial intelligence methods which have been designed to maximally help their user. They automate as much as possible but not more; when they do not know what their user’s goal is or they have not understood it, they know to ask. The methods are applied in drug design and in designing maximally autonomous cars.
The role of the Intelligent Robotics group is i) to develop uncertainty-aware methods of reward function modelling, and to use these models to decide whether the agent’s knowledge is sufficient to safely operate on its own or if asking for human feedback is needed and ii) to develop methods for interacting with the user in a maximally useful manner, that is, learning the most important factors with minimal interaction.
SANTTU
Duration: 2022-2024
Funded by: Business Finland
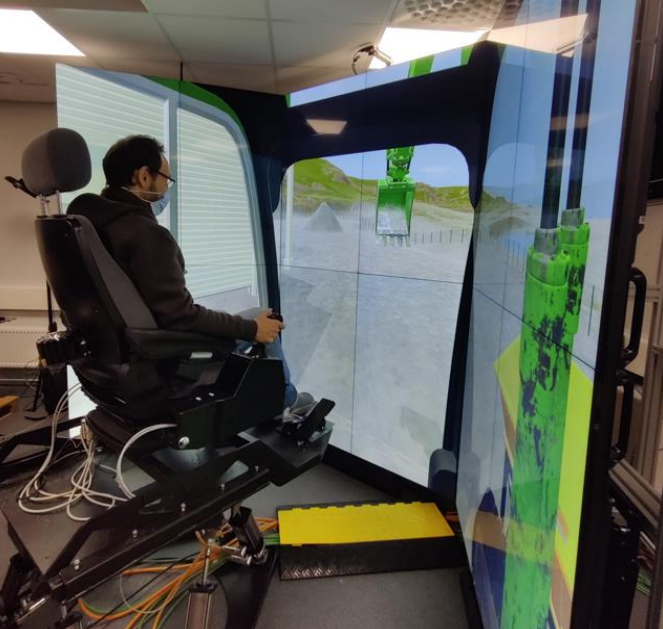
The SANTTU project focuses on the development of systems for operators of work machines and heavy industrial machines. The aim is to simplify the control and operation of the machines with semi-autonomous operator assistance systems. This can be used to reduce the cognitive stress on the operator as well as the stress on the machine, thus extending machine life, availability, and productivity. By combining physics-based (real-time) simulation, digital twins and artificial intelligence technologies, semi-automated systems can be created.
The role of the Intelligent Robotics group in this project is to develop environment representations able to exploit the rich information received by the machine multi-sensor arrays. These representations will serve as the basis to learn policies from demonstration by expert users, to be able then to assist novice users or to improve safety for heavy industrial machines.
B-REAL
Duration: 2020-2022
Funded by: Academy of Finland
The B-REAL project aims to solve the reality gap between autonomous learning in real and simulated worlds, where performance and safety are addressed before the real-world interaction. The project targets to address the research problems by proposing i) to model the surrogate dynamics of both the simulation and the real-world model through a powerful and novel continuous-time approach, ii) infer the coupling structure to optimally transport information learned from the simulator into the physical system, and iii) perform efficient safety-constrained exploration.
The role of the Intelligent Robotics group in this project is to develop methods ensuring safety for the situation where imperfect simulations of a physical system are used to bootstrap learning in the real world. In accordance with this purpose, an efficient exploration policy in simulation and a constrained model predictive control (MPC) based solution for safe operation in real-world will be developed.
IPALM
Duration: 2019-2022
Funded by: Academy of Finland, European Commission
The purpose of IPALM is to develop methods for the automatic digitization of objects and their physical properties by exploratory manipulations. These methods will be used to build a large collection of object models required for realistic grasping and manipulation experiments in robotics.
Our methods will learn the physical properties essential for perception and grasping simultaneously from different modalities: vision, touch, audio as well as text documents. Category-level prior models will be built by exploiting online available resources. A perception-action-learning loop will then use the robot’s vision, audio, and tactile senses to model instance-level object properties, guided by the more general category-level model. In return, knowledge acquired from a new instance will be used to improve the category-level knowledge.
ASSET
Duration: 2018-2022
Funded by: Academy of Finland
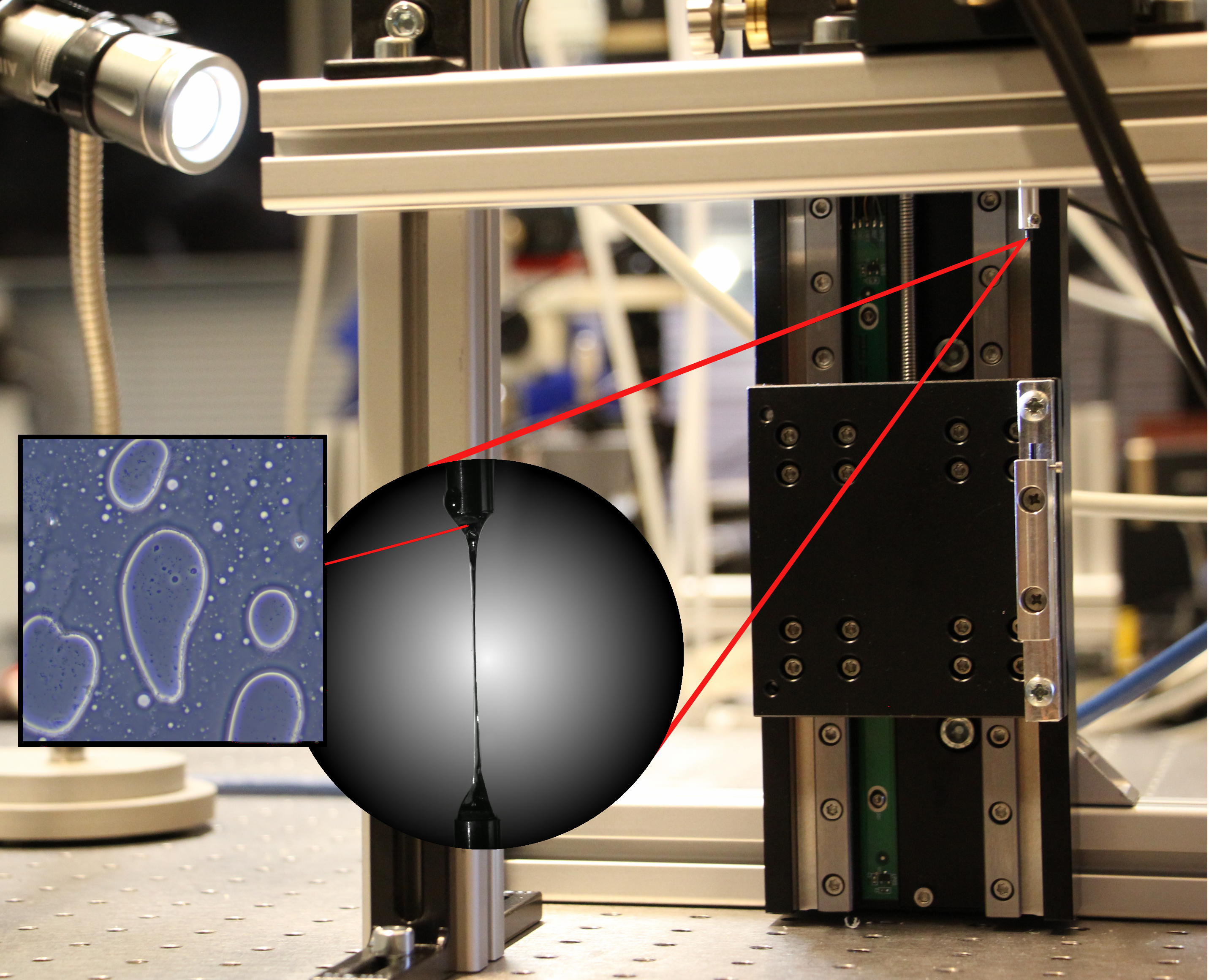
The AI Spider Silk Threading (ASSET) Project goal is to produce high-toughness artificial silk using bio-mimetic pultrusion and reinforcement learning. The natural spider pultrusion process will be mimicked by a robotic micro-manipulation system assisted by reinforcement learning.
The role of the Intelligent Robotics group in this project is the development of data-efficient reinforcement learning algorithms to assist the pultrusion process. The exploration using the physical pultrusion system is prohibitive in time, which highly benefits from using data-driven models. The learning algorithm will use as feedback material properties that can be correlated with simpler mechanical factors to gain insights on the bio-mechanical properties of silk materials.

ROSE
Duration: 2017-2020
Funded by: Academy of Finland
The ROSE Project – Robots and the Future of Welfare Services – conducts research on how the advance of service robot technologies enables the creation of innovative new products and services and the renewal of welfare services for the aging population.
The Intelligent Robotics group’s role in the project is both the consortium leader as well as the development, integration and assessment of robotic technology for welfare and health services. The Care-O-Bot 4 will be used as dedicated platform for service robotics research.
HBP
Duration: 2018-2020
Funded by: European Commission
The Human Brain Project is a major international effort that studies computational approaches for understanding the brain. We participate in the Neurorobotics sub-project of HBP which looks at how physical embodiment and the brain interact.
Deepen
Duration: 2018-2019
Funded by: Academy of Finland
The goal of the Deepen project was to develop methods for transferring reinforcement learning policies trained in low-fidelity simulations to the physical world. The project was a collaboration between Aalto University and University of Eastern Finland.
During the course of the project, we have worked on sim-to-real transfer of policies trained on low-fidelity images, and on few-shot adaptation of reinforcement learning policies trained using inaccurate simulations of system dynamics.

CCR
Duration: 2017-2019
Funded by: Academy of Finland
Cognitive Cooperative Robots (CCR) project studies the industrial uptake of recent developments in cognitive robotics such as learning from human demonstrations. The project is run in collaboration with the VTT – the national technology agency and Finnish industry.
SEA-SPIDER
Duration: 2015-2018
Funded by: Academy of Finland
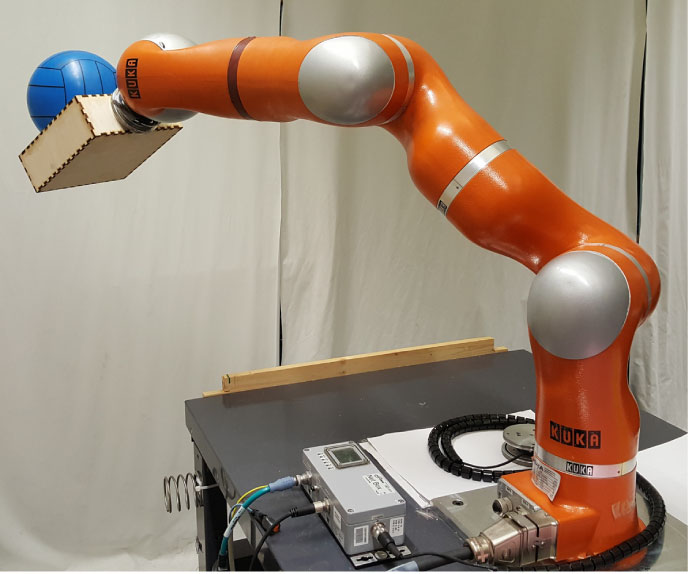
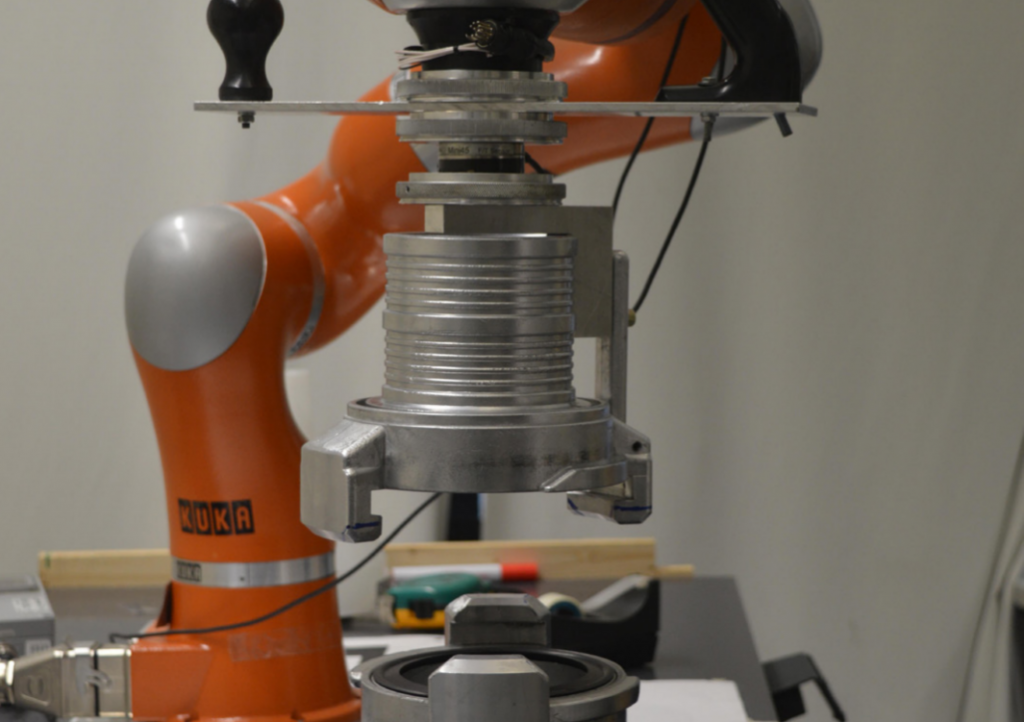
The goal of the project SEASPIDER was to enable the learning and execution of autonomous contact tasks, such as assembly or disassembly, in a challenging underwater environment.
For the first time, learning from demonstration was shown to work for in-contact tasks with hydraulic heavy-duty impedance-controlled manipulators capable of wielding payloads of hundreds of kilograms.