Month: October 2020

Video on “Probabilistic Surface Friction Estimation Based on Visual and Haptic Measurements”

Watch the video demonstration of our latest paper on friction coefficient estimation
Safe Model Predictive Control
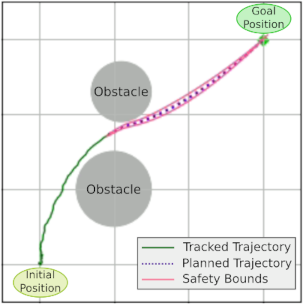
Safe Model Predictive Control (Safe MPC) aims to ensure that a physical system’s safety constraints are satisfied with high probability. Our research is on extending constrained MPC methods to cope with probabilistic safety constraints. We further research modeling uncertainty of dynamics to ensure safe exploration when combined with safety constraints learned in simulation, and learning powerful data-efficient surrogate models for complex dynamics.