Month: December 2021
Deformation-Aware Data-Driven Grasp Synthesis
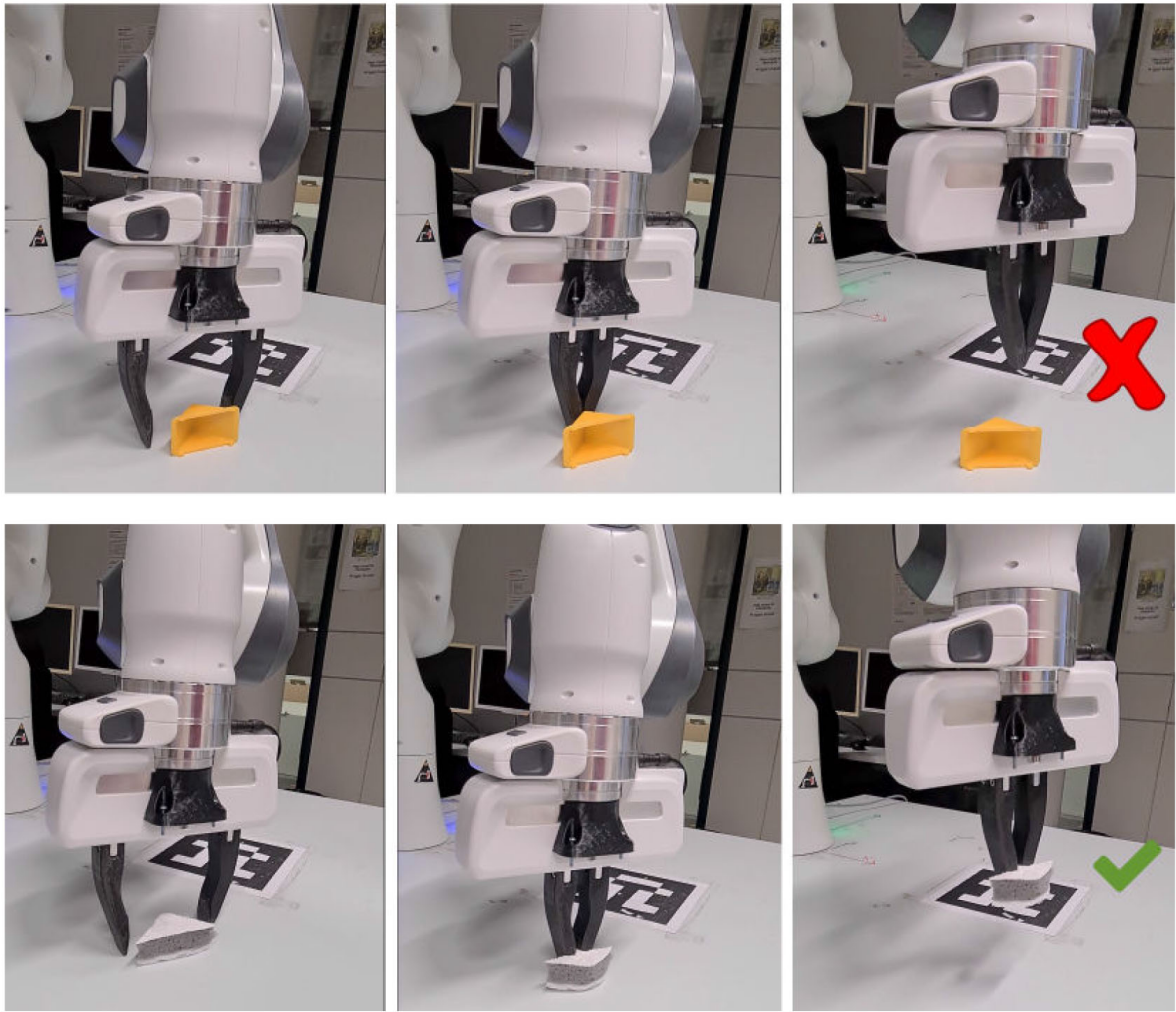
Abstract: Grasp synthesis for 3-D deformable objects remains a little-explored topic, most works aiming to minimize deformations. However, deformations are not necessarily harmful—humans are, for example, able to exploit deformations to generate new potential grasps. How to achieve that on a robot is though an open question. This letter proposes an approach that uses object […]