Month: January 2020
Accepted papers!!!
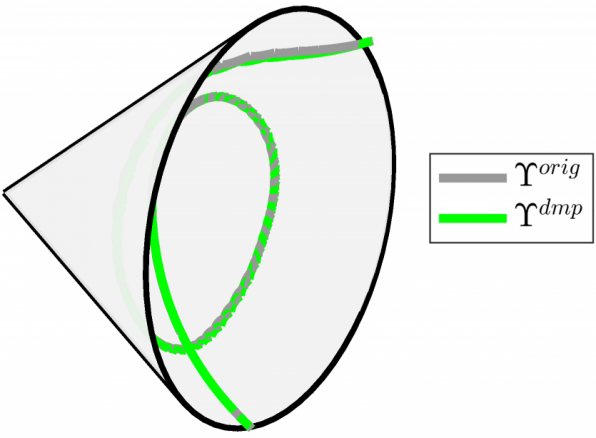
Great news!!! Our paper on “Geometry-aware Dynamic Movement Primitives” got accepted in ICRA2020
Hypermaps: Closing the complexity gap in robotic mapping
Hypermaps aim at improving how robots manage data about the environment they inhabit.
Bio-mimetic multipoint contact sensing
Tactile sensors have been primarily used to improve the agile manipulation capabilities of the robots. As opposed to previous efforts, the aim of this research is to be able to develop a reproducible and open-source multi-point tactile sensor array. In doing so, we aim to develop a sensor array that can provide an array of […]
Human-inspired navigation for robots
Humans possess the innate ability to navigate from one location to another and orient themselves to avoid getting lost in the process. Studies from rodents and other model species have provided unprecedented insights into the potential neural correlates of mammalian spatial cognition. Yet, those correlates have so far revealed little about applicable principles of navigational […]
Decision-Making in Autonomous Driving with Data- and Model-Based Methods Combination Ensuring Road Safety Aspects

In addition to transportation comfort and efficiency, autonomous vehicles provide a vital improvement in traffic safety by minimizing impact of human factor. In this project, the data- and model-based approaches will be combined to develop a safety-oriented decision-making algorithm for autonomous driving systems. The main assessment criteria for the vehicle performance actuation is traffic safety, […]
Deep Multi-Agent Reinforcement Learning for Decision Making in Autonomous Driving Systems

A high intelligence decision-making system is crucial for urban autonomous driving with dense surrounding dynamic objects. It must be able to handle the complex road geometry and topology, complex multi-agent interactions, and accurately follow the high-level commands such as routing information. The vehicle must apply sophisticated negotiation skills with other road users when overtaking, giving […]
Occupancy Uncertainty Maps

In this project we research how to build maps which include the uncertainty of the robot over the occupancy of the objects in the environment.
We have shown how the constructed maps can be used to increase global navigation safety by planning trajectories which avoid areas of high uncertainty, enabling higher autonomy for mobile robots in indoor settings.
Learning geometry-based robot-manipulation skills
In many robot control problems, skills such as stiffness, damping and manipulability ellipsoids are naturally represented as symmetric positive definite (SPD) matrices, orientations are represented as unit quaternions, sensory data processed as spatial covariances, etc., which capture the specific geometric characteristics of those skills. Typical learned skill models such as dynamic movement primitives (DMPs), probabilistic […]
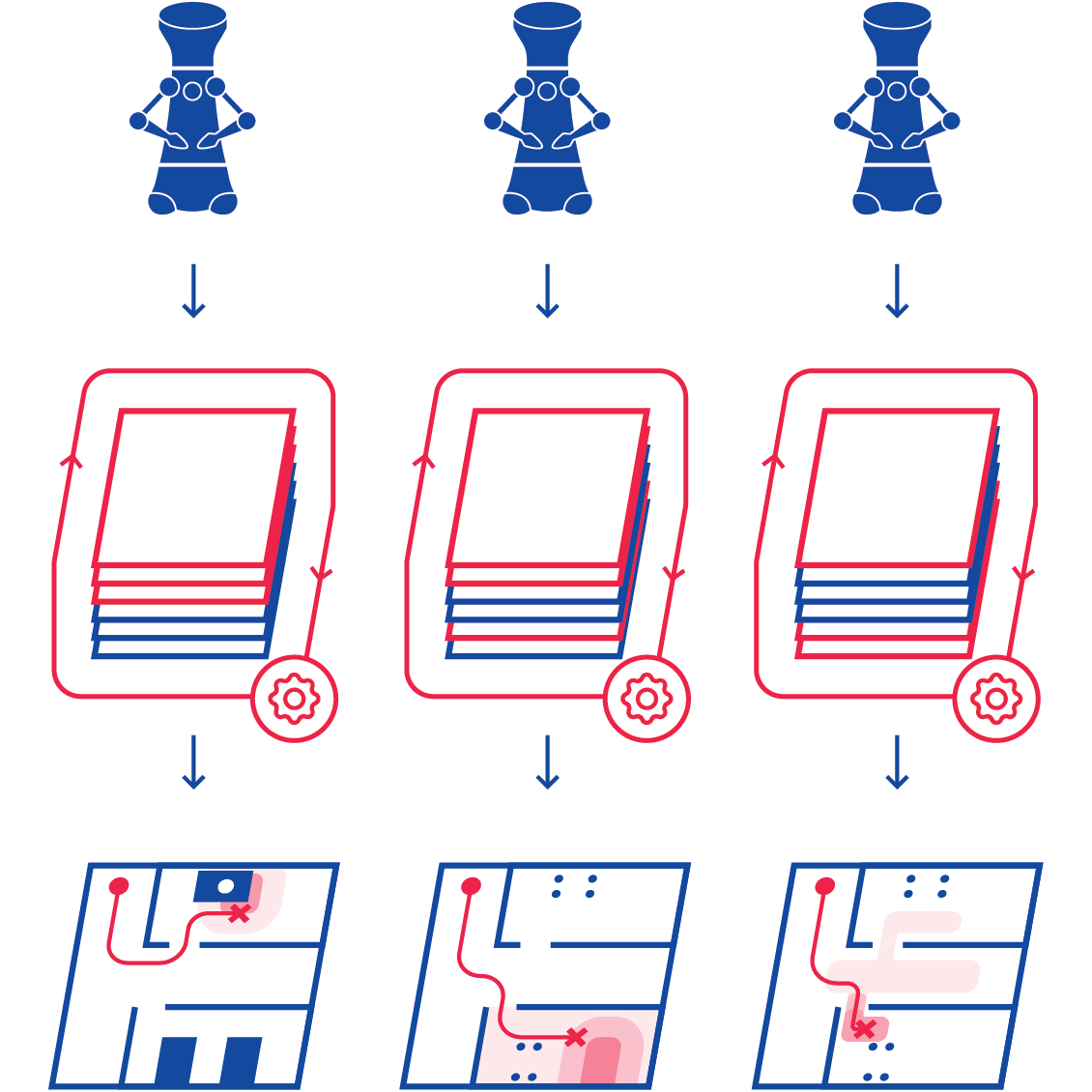
Autonomous Driving
Driverless cars and autonomous driving have shown major progress recently with the use of machine learning to learn driving behaviors from human demonstrations. However, the uptake of these is still limited, especially since the safety of such data-driven solutions is difficult to guarantee or even assess. Our work in autonomous driving targets the question how […]
Bio-inspired SLAM

Simultaneous localization and Mapping a.k.a. SLAM has been a well researched topic in the robotics community for over two decades. However, with the recent advances in the Neuroscience yielding deeper insights into the neural correlates of the mammalian brain, there is renewed interest in further exploration of nature inspired SLAM approaches. Rats, bats, and other […]