Decision-Making in Autonomous Driving with Data- and Model-Based Methods Combination Ensuring Road Safety Aspects
In addition to transportation comfort and efficiency, autonomous vehicles provide a vital improvement in traffic safety by minimizing impact of human factor. In this project, the data- and model-based approaches will be combined to develop a safety-oriented decision-making algorithm for autonomous driving systems. The main assessment criteria for the vehicle performance actuation is traffic safety, which includes other road users and ego vehicle itself. The algorithm will be first evaluation in simulation with real driving data. Therefore, the method will be tested on an experimental vehicle.
People involved
- Gokhan Alcan (gokhan.alcan@aalto.fi), postdoctoral researcher.
- Shoaib Azam (shoaib.azam@aalto.fi), postdoctoral researcher.
- Daulet Baimukashev (daulet.baimukashev@aalto.fi), doctoral candidate.
- Kargar Eshagh (eshagh.kargar@aalto.fi), doctoral candidate.
- Ville Kyrki (ville.kyrki@aalto.fi), professor.
Project updates
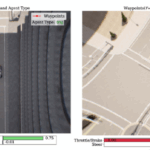
Master Thesis on “Learning Latent Action Policies for Autonomous Driving”
Learning action-conditioned driving dynamics from raw pixels is challenging due to high dimensionality and weak temporal cues. This work combines Latent Action Pretraining (LAPA) with a conditional Diffusion Model to learn discrete latent actions and predict their future evolution. The framework captures multi-modal driving behaviors in latent space, enabling interpretable and data-efficient policy learning for autonomous driving.