Master Thesis on “Data-Driven Diffusion Models for Enhancing Safety in Autonomous Vehicle Traffic Simulations”
Supervisor: Prof. Ville Kyrki (ville.kyrki@aalto.fi)
Advisor: Dr. Shoaib Azam (shoaib.azam@aalto.fi)
Keywords: Diffusion Models, Traffic simulation, Imitation Learning, Safe planning
Project Description
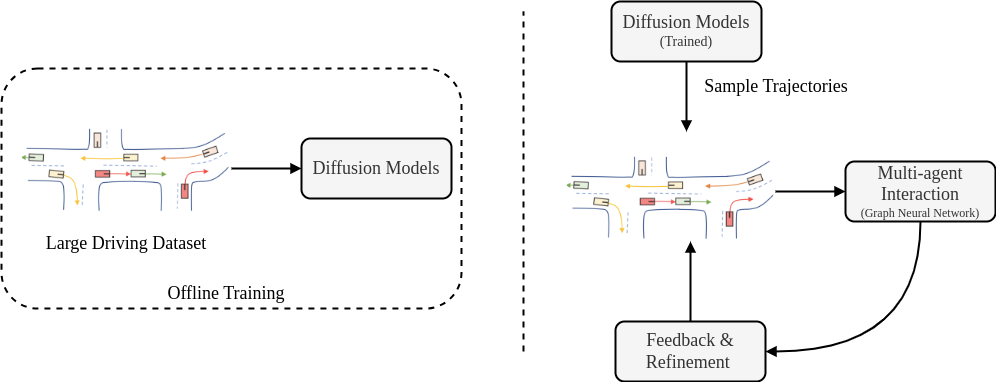
Simulation is a critical pillar in the testing and validation of autonomous vehicles (AVs), yet traditional methodologies often present a trade-off between realism and controllability, leaving much to be desired in replicating the complex dynamics of real-world driving. This limitation not only hampers AV development but also doubts the reliability of simulation-based validations. Recent advancements in data-driven diffusion models offer a promising avenue for bridging this gap by generating traffic scenarios that closely mirror real-world conditions. However, these models often overlook the intricate web of multi-agent interactions that AVs must navigate, a critical aspect that profoundly influences safety and operational efficiency.
This research aims to transcend these limitations by developing a data-driven diffusion model that elevates realism and controllability in simulations and intricately models the complex interactions between multiple agents for safe planning.
Deliverables
- Review of relevant literature.
- Develop a data-driven diffusion model for generating realistic, controllable, and safe traffic scenarios.
- Extending the model to account for multi-agent interactions, considering both autonomous and human-driven agents.
- Comparison of the implementation with the state-of-the-art methods.
Practical Information
Pre-requisites: Python(high), Deep Learning (high), and previous experience on RL is a big plus
Tools:PyTorch
Simulators: NVLabs-Traffic Simulation, Nuplan
Start:Available immediately
References
- BITS: Bi-level Imitation for Traffic Simulation (https://arxiv.org/pdf/2208.12403.pdf)
- Guided Conditional Diffusion for Controllable Traffic Simulation (https://arxiv.org/pdf/2210.17366.pdf)
- TrafficGen: Learning to Generate Diverse and Realistic Traffic Scenarios (https://arxiv.org/pdf/2210.06609v2.pdf)