Month: August 2024
Master’s thesis Topic on Analysis of Tactile Signals
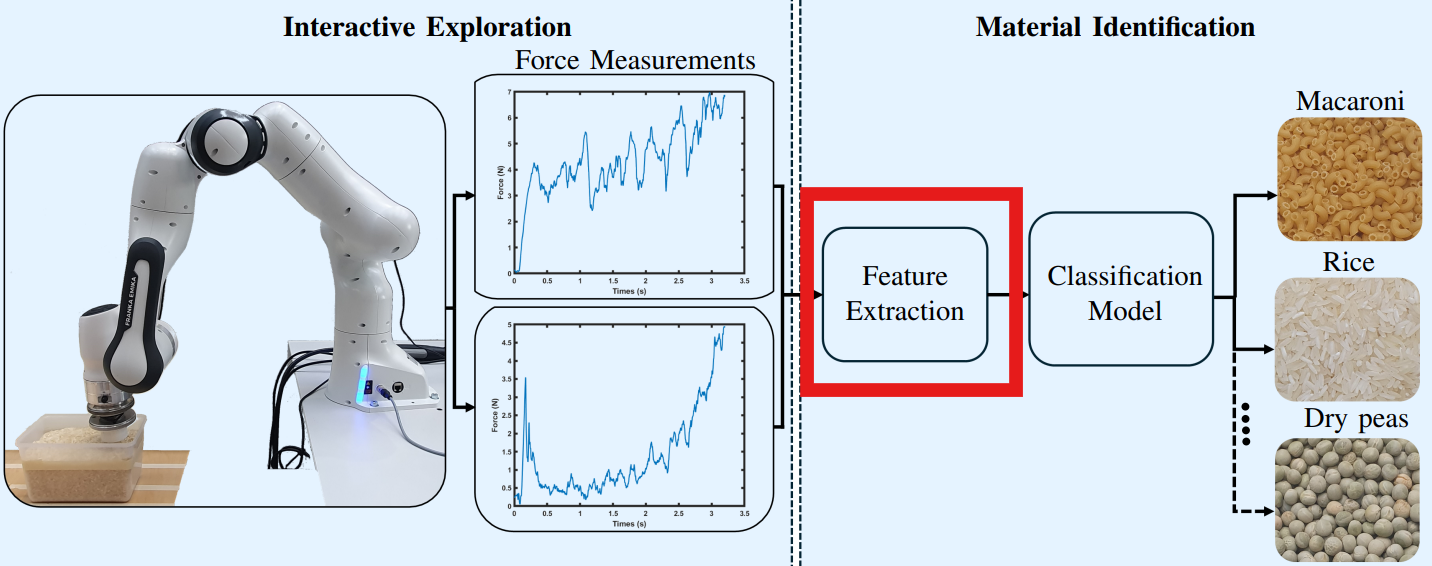
We are currently seeking for a motivated and talented master’s student to work on discriminative filtering and feature extraction for classification of tactile signals.
We are currently seeking for a motivated and talented master’s student to work on discriminative filtering and feature extraction for classification of tactile signals.