Author: nguyen74
SPONGE: Sequence Planning with Deformable-ON-Rigid ContactPrediction from Geometric Features

Abstract: Planning robotic manipulation tasks, especially those that involve interaction between deformable and rigid objects, is challenging due to the complexity in predicting such interactions. We introduce SPONGE, a sequence planning pipeline powered by a deep learning-based contact prediction model for contacts between deformable and rigid bodies under interactions. The contact prediction model is trained […]
A Novel Design of Soft Robotic Hand with a Human-inspired Soft Palm for Dexterous Grasping

Authors: Haihang Wang, Fares J. Abu-Dakka, Tran Nguyen Le, Ville Kyrki and He Xu IEEE Robotics and Automation Magazine (RAM), 2021 Abstract: Soft robotic hands and grippers are increasingly attracting attention as robotic end effectors. Compared with their rigid counterparts, they are safer for human-robot and environment-robot interactions, easier to control, and more compliant, and […]
Deformation-Aware Data-Driven Grasp Synthesis
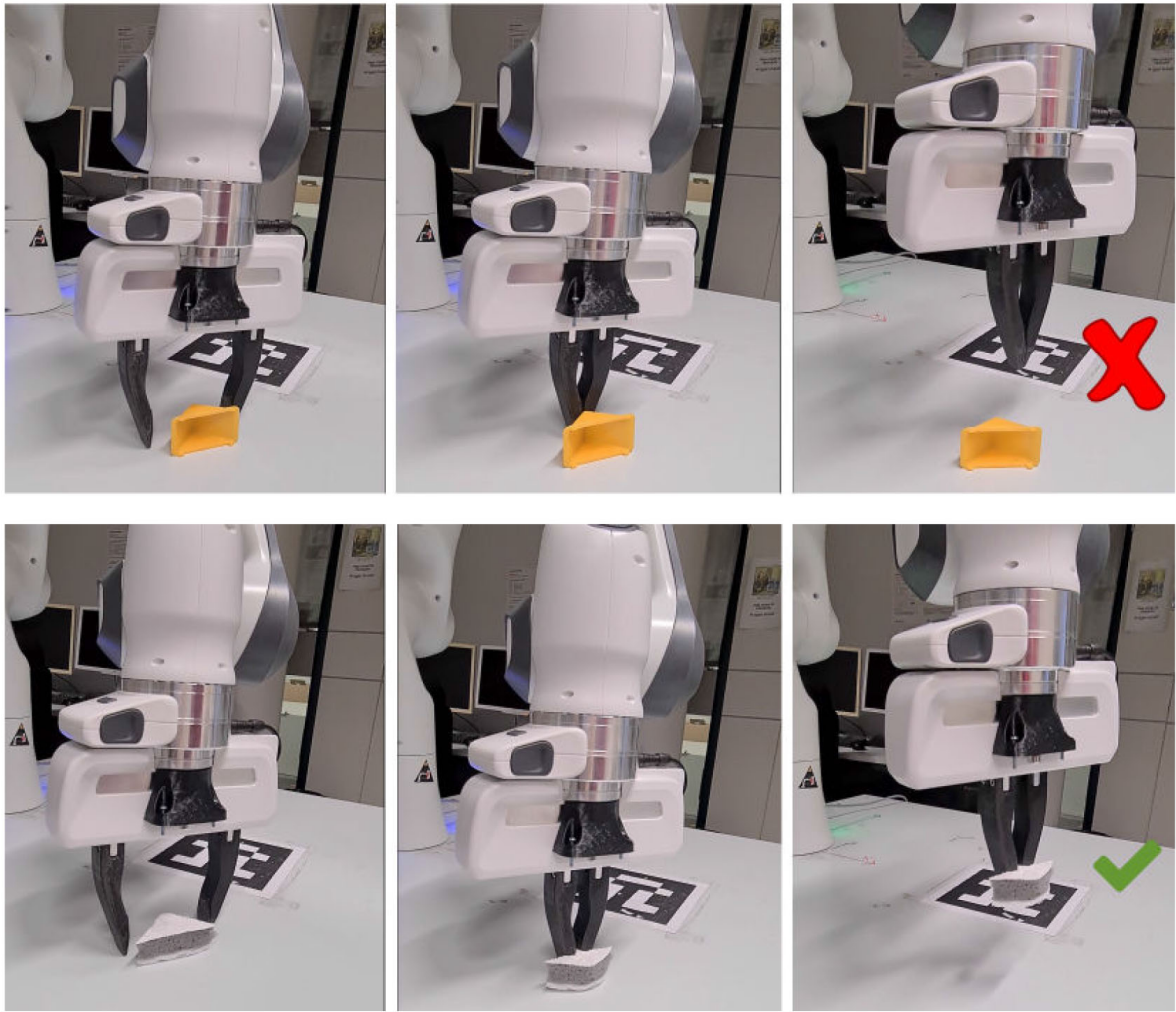
Abstract: Grasp synthesis for 3-D deformable objects remains a little-explored topic, most works aiming to minimize deformations. However, deformations are not necessarily harmful—humans are, for example, able to exploit deformations to generate new potential grasps. How to achieve that on a robot is though an open question. This letter proposes an approach that uses object […]
Towards synthesizing grasps for 3D deformable objects with physics-based simulation

Grasping deformable objects is not well researched due to the complexity in modelling and simulating the dynamic behavior of such objects. However, with the rapid development of physics-based simulators that support soft bodies, the research gap between rigid and deformable objects is getting smaller. To leverage the capability of such simulators and to challenge the […]
Safe Grasping with a Force Controlled Soft Robotic Hand

Paper accepted to 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC) Abstract: Safe yet stable grasping requires a robotic hand to apply sufficient force on the object to immobilize it while keeping it from getting damaged. Soft robotic hands have been proposed for safe grasping due to their passive compliance, but even such […]
Probabilistic Surface Friction Estimation Based on Visual and Haptic Measurements

Accurately modeling local surface properties of objects is crucial to many robotic applications, from grasping to material recognition. Surface properties like friction are however difficult to estimate, as visual observation of the object does not convey enough information over these properties. In contrast, haptic exploration is time consuming as it only provides information relevant to […]
Soft Robotic Hand
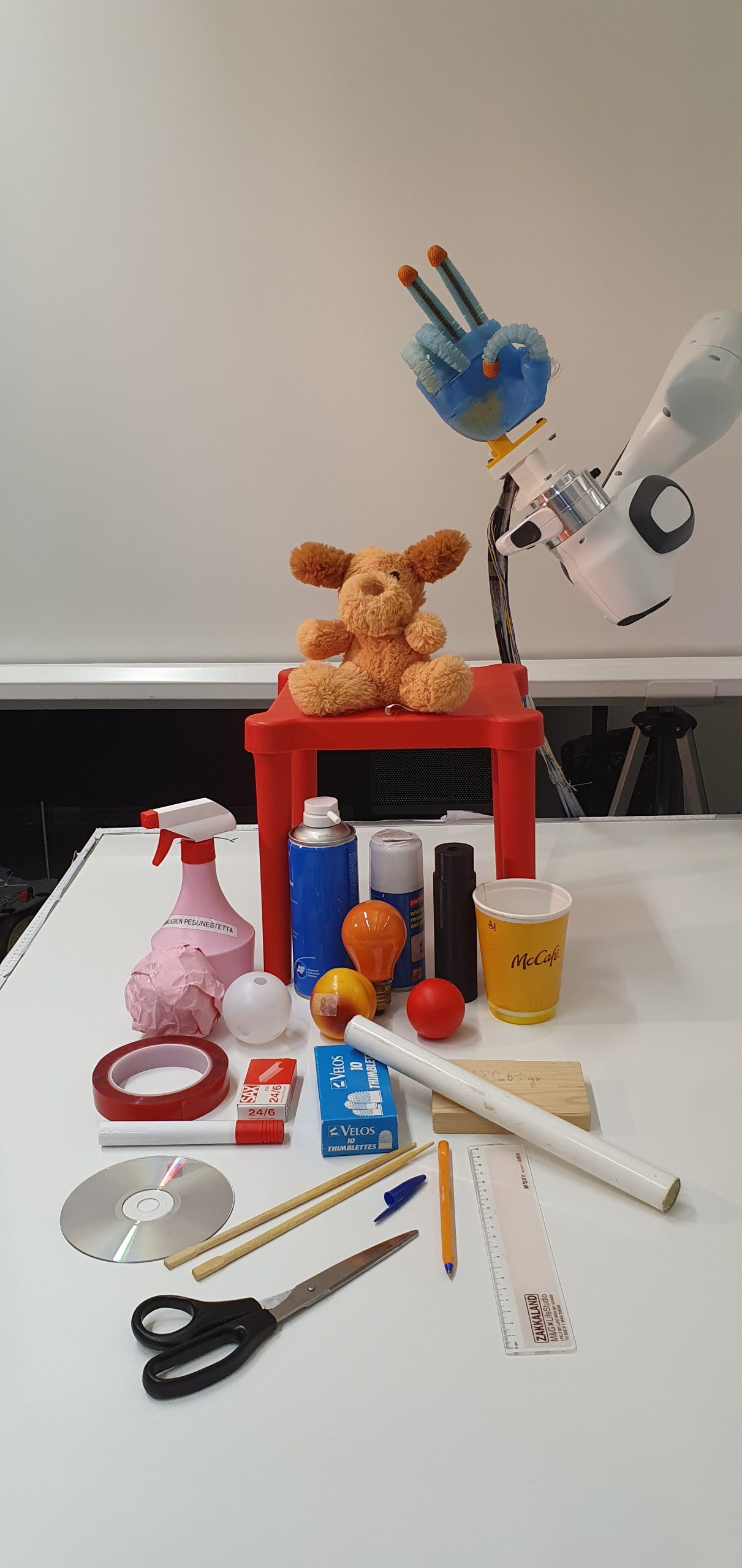
Robotic grasping has been studied for more than 30 years, but it is still a challenging field. Today, most robotic grippers are rigid, making it hard for them to grasp and handle irregularly shaped objects that are delicate and easily deformed such as a compact disc, an egg, or an empty plastic cup. To tackle […]
Exploiting Object Physical Properties for Grasping

In robotic manipulation, robots are required to interact with, and adapt to, unknown environments and objects. In order to successfully accomplish these tasks, robots need to identify various properties of the objects to be handled. For these reasons, identifying object models that can represent the properties of objects has become a crucial issue in robotics. […]