SPONGE: Sequence Planning with Deformable-ON-Rigid ContactPrediction from Geometric Features

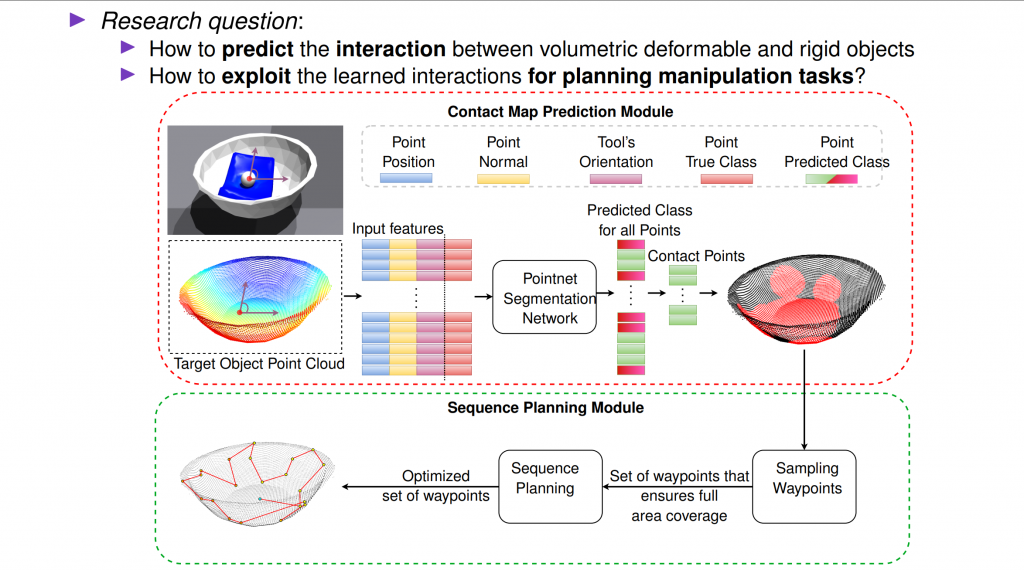
Abstract: Planning robotic manipulation tasks, especially those that involve interaction between deformable and rigid objects, is challenging due to the complexity in predicting such interactions. We introduce SPONGE, a sequence planning pipeline powered by a deep learning-based contact prediction model for contacts between deformable and rigid bodies under interactions. The contact prediction model is trained on synthetic data generated by a developed simulation environment to learn the mapping from point-cloud observation of a rigid target object and the pose of a deformable tool, to 3D representation of the contact points between the two bodies. We experimentally evaluated the proposed approach for a dish-cleaning task both in simulation and on a real \panda with real-world objects. The experimental results demonstrate that in both scenarios the proposed planning pipeline is capable of generating high-quality trajectories that can accomplish the task by achieving more than 90\% area coverage on different objects of varying sizes and curvatures while minimizing travel distance.
You can read the full paper here: Arxiv
Video
Method Overview
Code & Dataset:
- Simulation Code: Link
- Real-World Robot Code: TBD
- Download the dataset (62 GB) here.
Citation:
@misc{tran2023sponge,
title={SPONGE: Sequence Planning with Deformable-ON-Rigid Contact Prediction from Geometric Features},
author={Tran Nguyen Le and Fares J. Abu-Dakka and Ville Kyrki},
year={2023},
eprint={2303.14012},
archivePrefix={arXiv},
primaryClass={cs.RO}
}