Soft Robotic Hand
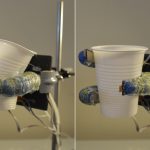
Robotic grasping has been studied for more than 30 years, but it is still a challenging field. Today, most robotic grippers are rigid, making it hard for them to grasp and handle irregularly shaped objects that are delicate and easily deformed such as a compact disc, an egg, or an empty plastic cup. To tackle this issue, soft robotic hands have been introduced.
Despite the advantages of soft robotic hands, their applications are still limited to simple pick-and-place tasks. The main reason for this is their
lack of sensing capabilities, which leads to the absence of information about
the internal state of the hand or the interaction between the hand and the environment.
In this research, we aim to provide both novel designs and sensing capabilities for soft robotic hands. We then demonstrated the developed soft hand with a great diversity of grasps.
People involved
- Tran Nguyen Le (tran.nguyenle@aalto.fi), Doctoral Candidate
- Fares J. Abu-Dakka (fares.abu-dakka@aalto.fi), Research Fellow
- Ville Kyrki (ville.kyrki@aalto.fi), Professor
Project updates

A Novel Design of Soft Robotic Hand with a Human-inspired Soft Palm for Dexterous Grasping
Authors: Haihang Wang, Fares J. Abu-Dakka, Tran Nguyen Le, Ville Kyrki and He Xu IEEE Robotics and Automation Magazine (RAM), 2021 Abstract: Soft robotic hands and grippers are increasingly attracting attention as robotic end effectors. Compared with their rigid counterparts, they are safer for human-robot and environment-robot interactions, easier to control, and more compliant, and […]
Safe Grasping with a Force Controlled Soft Robotic Hand
Paper accepted to 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC) Abstract: Safe yet stable grasping requires a robotic hand to apply sufficient force on the object to immobilize it while keeping it from getting damaged. Soft robotic hands have been proposed for safe grasping due to their passive compliance, but even such […]