Month: March 2021
Safe Grasping with a Force Controlled Soft Robotic Hand

Paper accepted to 2020 IEEE International Conference on Systems, Man, and Cybernetics (SMC) Abstract: Safe yet stable grasping requires a robotic hand to apply sufficient force on the object to immobilize it while keeping it from getting damaged. Soft robotic hands have been proposed for safe grasping due to their passive compliance, but even such […]
Probabilistic Surface Friction Estimation Based on Visual and Haptic Measurements

Accurately modeling local surface properties of objects is crucial to many robotic applications, from grasping to material recognition. Surface properties like friction are however difficult to estimate, as visual observation of the object does not convey enough information over these properties. In contrast, haptic exploration is time consuming as it only provides information relevant to […]
Soft Robotic Hand
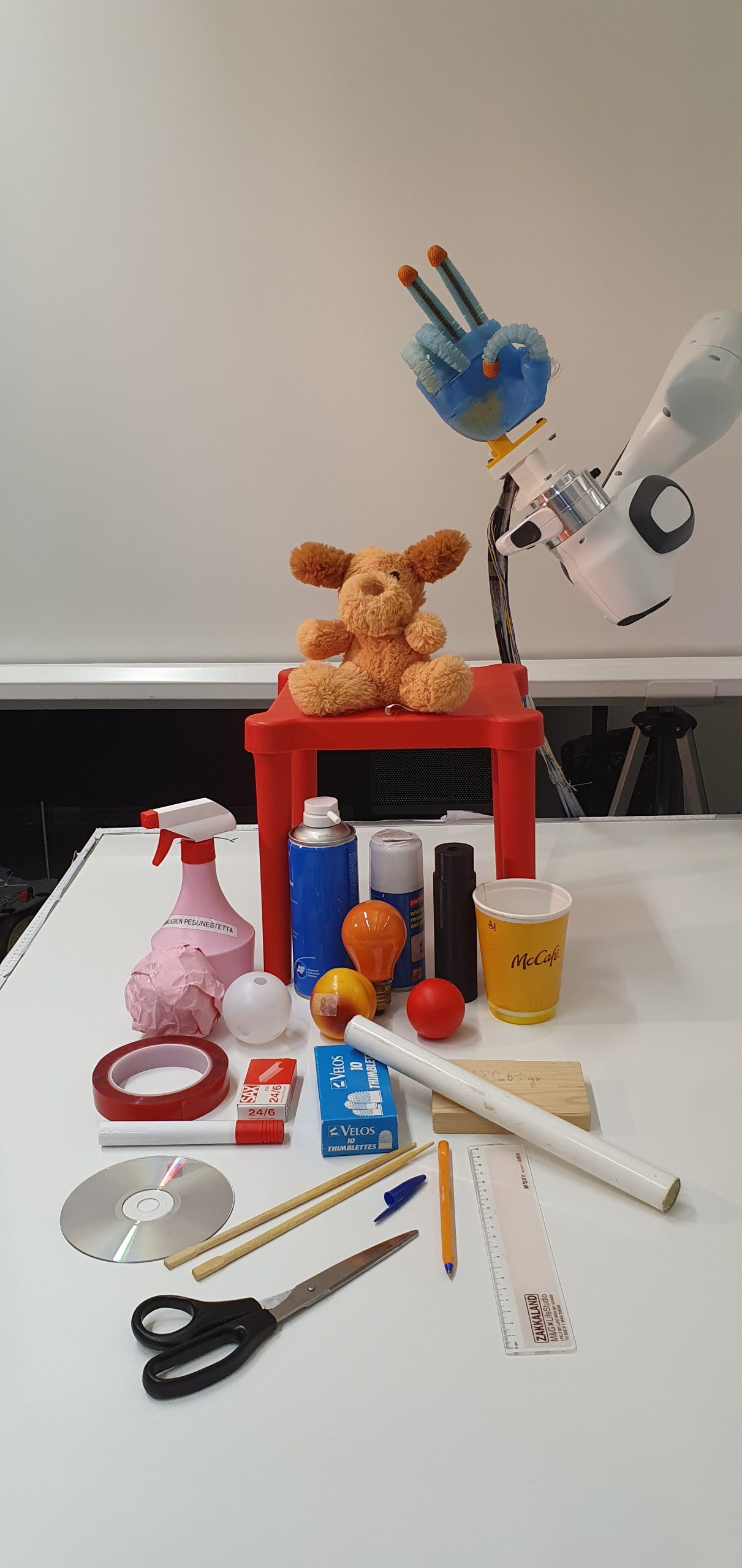
Robotic grasping has been studied for more than 30 years, but it is still a challenging field. Today, most robotic grippers are rigid, making it hard for them to grasp and handle irregularly shaped objects that are delicate and easily deformed such as a compact disc, an egg, or an empty plastic cup. To tackle […]
Exploiting Object Physical Properties for Grasping

In robotic manipulation, robots are required to interact with, and adapt to, unknown environments and objects. In order to successfully accomplish these tasks, robots need to identify various properties of the objects to be handled. For these reasons, identifying object models that can represent the properties of objects has become a crucial issue in robotics. […]
Multi-FinGAN: Generative Coarse-To-Fine Sampling of Multi-Finger Grasps

Preprint https://arxiv.org/pdf/2012.09696.pdf.