Category: Explainable Interactions between Humans and Autonomous Systems
Master Thesis on “Egocentric Gaze Prediction via Self-Supervised Feature Forecasting”
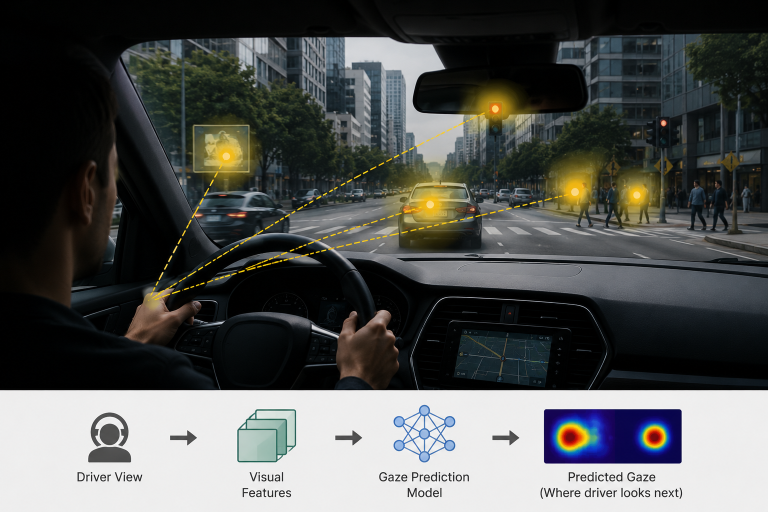
Predicting human gaze—especially in egocentric or driving scenarios—is fundamentally about modeling where people will attend next, not just where they are looking now. This thesis focus on designing and implementing a pipeline that integrates feature forecasting with a gaze prediction module, conduct experiments on egocentric datasets, and systematically evaluate the benefits of future-aware representations.