Category: Uncategorized
Summer Internships at the Intelligent Robotics Group
Every year the Intelligent Robotics Lab hires summer interns for a multitude of projects, ranging from infrastructure projects to advanced research topics. Two summer interns who recently finished their summer stay in Helsinki in 2023 are Tiia Tikkala and Sergio Hernández, both supervised by Dr. Kevin Sebastian Luck.
Master thesis topics are out

Are you a student interested in working with real robots on a challenging master thesis? Check our the open topics!
Explainable Interactions between Humans and Autonomous Systems
With the growing advancement of robotics research, there is a growing need for people-friendly communication between robots and humans. On one hand, the decisions of the autonomous system need to be understandable to humans, and on the other – humans need to be able to specify commands in a way that is natural to them. […]
Deformable Object Manipulation
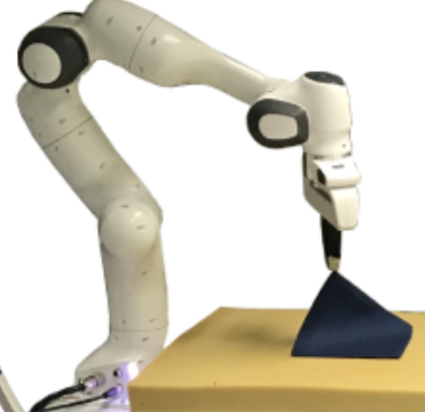
In this project we research on how to manipulate more efficiently deformable objects by using dynamic manipulation as well as the modeling deformable objects via graph structures. Our applications range from manipulation of granular materials such as ground coffee to cloth manipulation.
ICRA 2023, here we come!

The Intelligent Robotics group will attend to ICRA 2023. Read more!
Our work “Learning Visual Feedback Control for Dynamic Cloth Folding” was accepted to IROS 2022!

We are happy to announce that our work “Learning Visual Feedback Control for Dynamic Cloth Folding” was accepted to IROS 2022 and nomitated to both the IROS Best Paper award, Best Student Paper award and the IROS Best RoboCup Paper Award.
Manipulation of Granular Materials by Learning Particle Interactions

In this work we propose to use a Graph Neural Network (GNN) surrogate model to learn the particle interactions of granular materials. We perform planning of manipulation trajectories with the learnt surrogate model to arrange the material into a desired configuration.
Season-invariant GNSS-denied visual localization for UAVs

This repository contains data and code for manuscript J. Kinnari, F. Verdoja, V. Kyrki “Season-invariant GNSS-denied visual localization for UAVs”.
Soft Robotic Hand
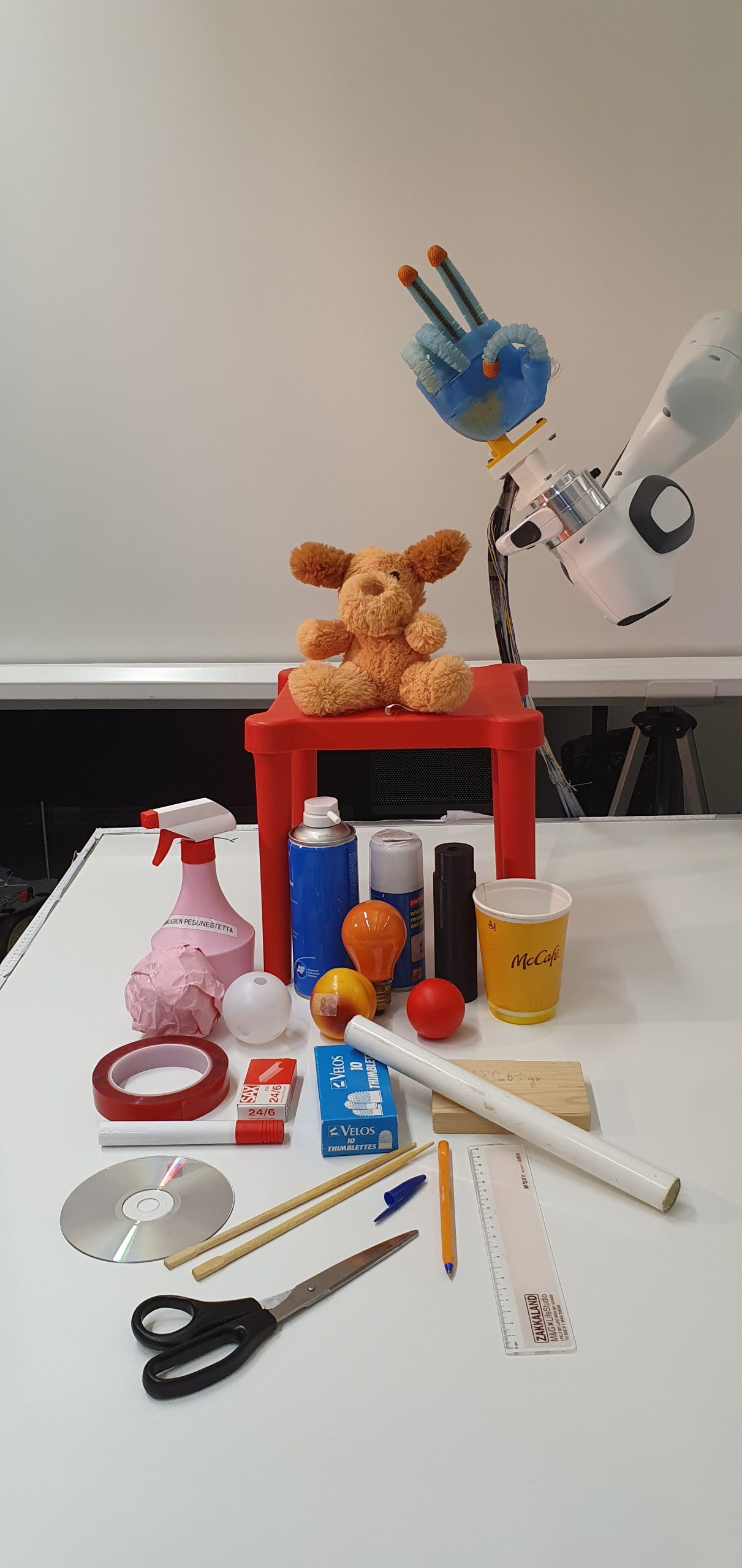
Robotic grasping has been studied for more than 30 years, but it is still a challenging field. Today, most robotic grippers are rigid, making it hard for them to grasp and handle irregularly shaped objects that are delicate and easily deformed such as a compact disc, an egg, or an empty plastic cup. To tackle […]
Exploiting Object Physical Properties for Grasping

In robotic manipulation, robots are required to interact with, and adapt to, unknown environments and objects. In order to successfully accomplish these tasks, robots need to identify various properties of the objects to be handled. For these reasons, identifying object models that can represent the properties of objects has become a crucial issue in robotics. […]