Author: Administrator
Multi-FinGAN: Generative Coarse-To-Fine Sampling of Multi-Finger Grasps

Preprint https://arxiv.org/pdf/2012.09696.pdf.
Beyond Top-Grasps Through Scene Completion

Current end-to-end grasp planning methods propose grasps in the order of seconds that attain high grasp success rates on a diverse set of objects, but often by constraining the workspace to top-grasps. In this work, we present a method that allows end-to-end top-grasp planning methods to generate full six-degree-of-freedom grasps using a single RGB-D view […]
Accepted papers!!!
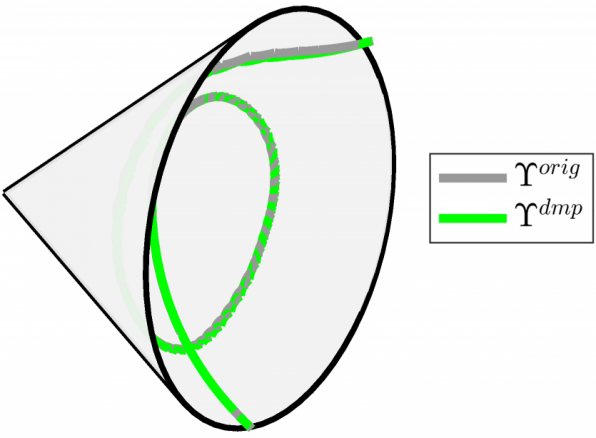
Great news!!! Our paper on “Geometry-aware Dynamic Movement Primitives” got accepted in ICRA2020
Learning geometry-based robot-manipulation skills
In many robot control problems, skills such as stiffness, damping and manipulability ellipsoids are naturally represented as symmetric positive definite (SPD) matrices, orientations are represented as unit quaternions, sensory data processed as spatial covariances, etc., which capture the specific geometric characteristics of those skills. Typical learned skill models such as dynamic movement primitives (DMPs), probabilistic […]
Shape-based grasping

In robotic grasping, knowing the object shape allows for better grasp planning. However, in many environments it is impossible to know a priori the shape of all possible objects. For this reason, the object to be grasped is usually perceived through some sensory input, commonly vision. However, one of the main problems with this approach […]