Month: June 2023
Explainable Interactions between Humans and Autonomous Systems
With the growing advancement of robotics research, there is a growing need for people-friendly communication between robots and humans. On one hand, the decisions of the autonomous system need to be understandable to humans, and on the other – humans need to be able to specify commands in a way that is natural to them. […]
Deformable Object Manipulation
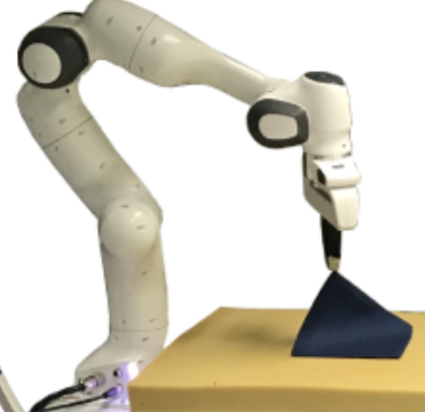
In this project we research on how to manipulate more efficiently deformable objects by using dynamic manipulation as well as the modeling deformable objects via graph structures. Our applications range from manipulation of granular materials such as ground coffee to cloth manipulation.
Participation at the ICRA’23 Cloth Manipulation Challenge
We participated at the Cloth Manipulation and Perception Track at the IEEE ICRA 2023 Robotic Grasping and Manipulation Competition.