Deformable Object Manipulation
Robotic manipulation of deformable objects presents several challenges that are not present in rigid objects. The configuration space of deformable objects is high dimensional and their dynamics are highly affected by the material properties, making it even more complex to observe the state or deformation of the object. Whereas for rigid objects their position and orientation are usually enough to describe their location in the world, deformable objects do not have a simple representation available, which requires more complex representations to manipulate the material.
Our research focuses on efficiently manipulating deformable objects by using dynamic manipulation as well as modeling deformable objects via graph structures. The applications range from the manipulation of granular materials, such as ground coffee, to manipulating cloths.
People involved
- David Blanco-Mulero (david.blancomulero(at)aalto.fi), PhD candidate.
- Gökhan Alcan (gokhan.alcan(at)aalto.fi), Postdoctoral researcher.
- Ville Kyrki (ville.kyrki(at)aalto.fi), Professor, group leader.
Project updates
Interactive Identification of Granular Materials using Force Measurements
To be updated. The code and dataset available at https://github.com/samhyn/granular_identification.

Our work “QDP: Learning to Sequentially Optimise Quasi-Static and Dynamic Manipulation Primitives for Robotic Cloth Manipulation” was accepted to IROS 2023!
We are happy to announce that our work “QDP: Learning to Sequentially Optimise Quasi-Static and Dynamic Manipulation Primitives for Robotic Cloth Manipulation” was accepted to IROS 2023.

Participation at the ICRA’23 Cloth Manipulation Challenge
We participated at the Cloth Manipulation and Perception Track at the IEEE ICRA 2023 Robotic Grasping and Manipulation Competition.
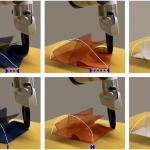
Our work “Learning Visual Feedback Control for Dynamic Cloth Folding” was accepted to IROS 2022!
We are happy to announce that our work “Learning Visual Feedback Control for Dynamic Cloth Folding” was accepted to IROS 2022 and nomitated to both the IROS Best Paper award, Best Student Paper award and the IROS Best RoboCup Paper Award.
Manipulation of Granular Materials by Learning Particle Interactions
In this work we propose to use a Graph Neural Network (GNN) surrogate model to learn the particle interactions of granular materials. We perform planning of manipulation trajectories with the learnt surrogate model to arrange the material into a desired configuration.
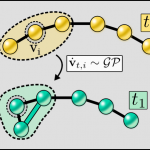
Evolving-Graph Gaussian Processes poster at the Time Series Workshop at ICML 2021
This work extends the current SotA of Graph Gaussian Processes (GGPs) to dynamic graphs and asses the performance of the proposed evolving-Graph Gaussian Process (e-GGP) in two simulated tasks where deformable objects are represented as a graph that evolves over time.