Author: Francesco Verdoja
Master Thesis on “Visual segmentation of elevator components with robotic platform”
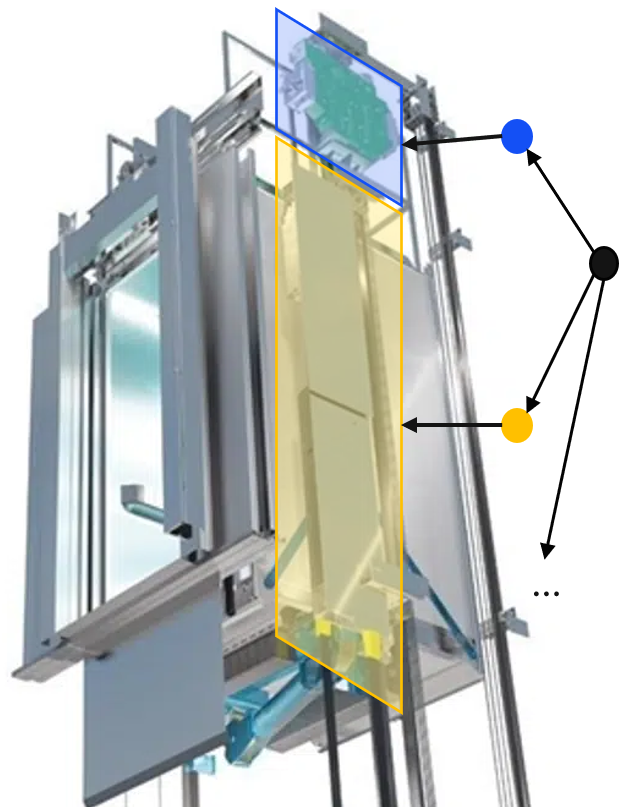
This thesis focuses on developing and evaluating visual segmentation methods for elevator components using a mobile robotic platform.
Intelligent Robotics @ IROS 2025

We will be attending the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025) in Hanzhou, China
Intelligent Robotics @ IROS 2024

The Intelligent Robotics Group will be at IROS 2024 with six conference papers and two workshops
Master thesis topics are out

Are you a student interested in working with real robots on a challenging master thesis? Check our the open topics!
Academy of Finland Research Fellowship awarded to the Hypermaps project

Francesco Verdoja was awarded a Research Fellowship on his project “Hypermaps: closing the complexity gap in robotic mapping”
Season-invariant GNSS-denied visual localization for UAVs

This repository contains data and code for manuscript J. Kinnari, F. Verdoja, V. Kyrki “Season-invariant GNSS-denied visual localization for UAVs”.



