Month: November 2022
Semantic map generation in SUMO
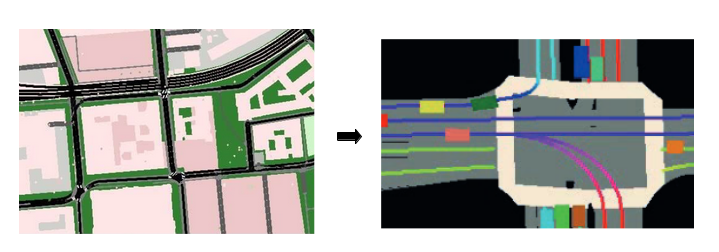
This project aims to extend the functionality of the SUMO simulator with suitable software packages which generate semantic representations and control the vehicles using low-level control actions. This enables integration of data-driven vehicle models.