Month: January 2020
Sim-to-real transfer in reinforcement learning

Getting robots to autonomously learn to perform various tasks is often a long-term process, during which the robot’s exploratory actions can be unpredictable and potentially dangerous to the surrounding environment and to the robot itself. To mitigate the risk of hardware damage and to speed up the learning process, initial phases of learning are often […]
Shape-based grasping

In robotic grasping, knowing the object shape allows for better grasp planning. However, in many environments it is impossible to know a priori the shape of all possible objects. For this reason, the object to be grasped is usually perceived through some sensory input, commonly vision. However, one of the main problems with this approach […]
Teacher-Learner Interaction for Active Learning Robots
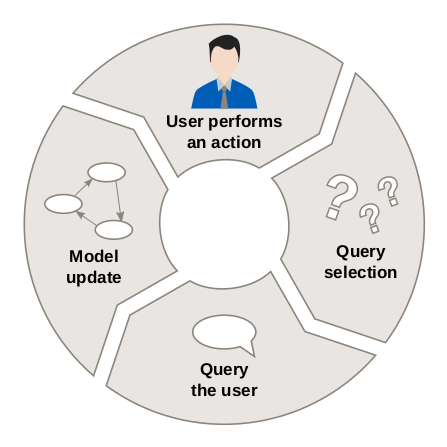
Service robots will be deployed in the future as general assistive devices in dynamic human environments like households, schools and hospitals. In order to be valuable and cost-effective assistants, robots must allow a wide range of customization, especially regarding their skills. As pre-programming robots for every situation is impossible, robots need to gain new skills […]
Dataset for “Hallucinating Robots”
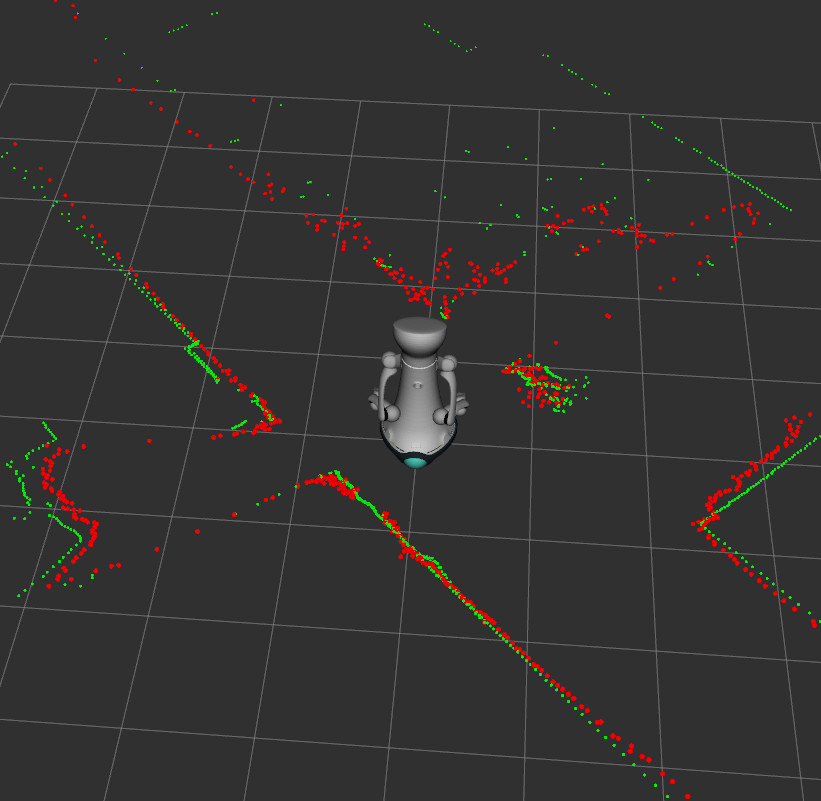
We released the dataset for our IROS 2018 paper “Hallucinating Robots: Inferring Obstacle Distances from Partial Laser Measurements”.
Source code for the Hypermaps project

The source code for the article “Hypermap Mapping Framework and its Application to Autonomous Semantic Exploration” is available on github.
Pre-print of “Hypermap Mapping Framework and its Application to Autonomous Semantic Exploration” available on arXiv

Our paper has been uploaded on arXiv
Toy Dataset

The toy-dataset is a new RGB-D dataset captured with the Kinect sensor. The dataset is composed of typical children’s toys and contains a total of 449 RGB-D images alongside with their annotated ground truth images.