Category: Uncategorized
Learning geometry-based robot-manipulation skills
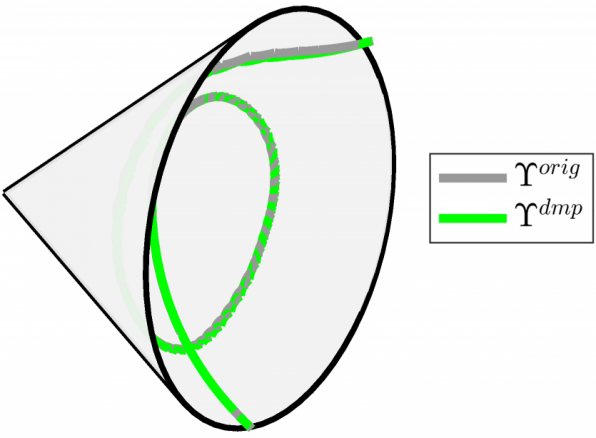
In many robot control problems, skills such as stiffness, damping and manipulability ellipsoids are naturally represented as symmetric positive definite (SPD) matrices, orientations are represented as unit quaternions, sensory data processed as spatial covariances, etc., which capture the specific geometric characteristics of those skills. Typical learned skill models such as dynamic movement primitives (DMPs), probabilistic […]
Autonomous Driving

Driverless cars and autonomous driving have shown major progress recently with the use of machine learning to learn driving behaviors from human demonstrations. However, the uptake of these is still limited, especially since the safety of such data-driven solutions is difficult to guarantee or even assess. Our work in autonomous driving targets the question how […]
Bio-inspired SLAM

Simultaneous localization and Mapping a.k.a. SLAM has been a well researched topic in the robotics community for over two decades. However, with the recent advances in the Neuroscience yielding deeper insights into the neural correlates of the mammalian brain, there is renewed interest in further exploration of nature inspired SLAM approaches. Rats, bats, and other […]
Sim-to-real transfer in reinforcement learning

Getting robots to autonomously learn to perform various tasks is often a long-term process, during which the robot’s exploratory actions can be unpredictable and potentially dangerous to the surrounding environment and to the robot itself. To mitigate the risk of hardware damage and to speed up the learning process, initial phases of learning are often […]
Shape-based grasping

In robotic grasping, knowing the object shape allows for better grasp planning. However, in many environments it is impossible to know a priori the shape of all possible objects. For this reason, the object to be grasped is usually perceived through some sensory input, commonly vision. However, one of the main problems with this approach […]
Teacher-Learner Interaction for Active Learning Robots
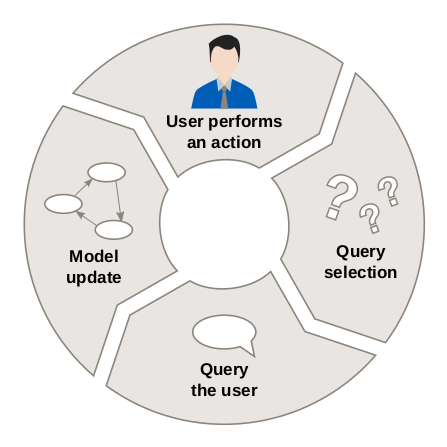
Service robots will be deployed in the future as general assistive devices in dynamic human environments like households, schools and hospitals. In order to be valuable and cost-effective assistants, robots must allow a wide range of customization, especially regarding their skills. As pre-programming robots for every situation is impossible, robots need to gain new skills […]
Toy Dataset

The toy-dataset is a new RGB-D dataset captured with the Kinect sensor. The dataset is composed of typical children’s toys and contains a total of 449 RGB-D images alongside with their annotated ground truth images.
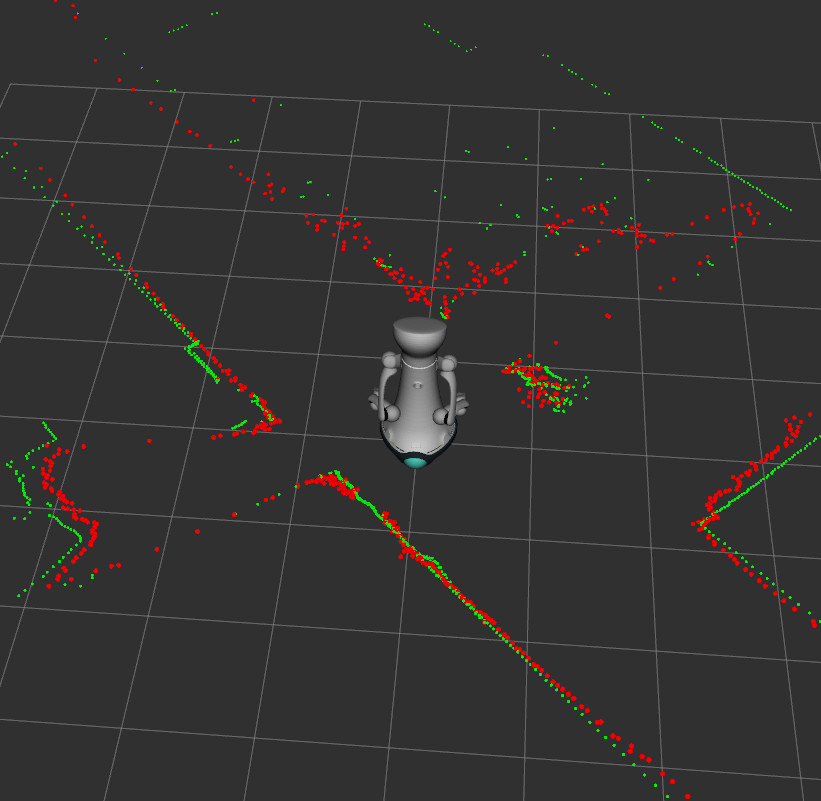
Mapping and Navigation

For any mobile robotic platform, the ability to navigate its environment is important. Avoiding dangerous situations such as collisions and unsafe conditions is a crucial capability to achieve autonomy. Moreover, robots need to maintain a representation of their environment in order to properly operate inside it; this is achieved through maps, often built by the […]
Robotic Perception
Robots’ ability to interact with their surroundings is an essential capability, especially in unstructured human-inhabited environments. The knowledge of such an environment is usually obtained through sensors. The study of acquiring knowledge from sensor data is called robotic perception. Perception is the first step in many tasks such as manipulation or human-robot interaction.
Robot Learning

Programming robots to perform various tasks often requires extensive domain knowledge and a tedious programming process. The size of the program rapidly grows with task complexity; explicitly programming a robot to perform challenging tasks in a variety of environments would require the programmer to write routines for an enormous number of situations that may possibly […]