Category: Learning geometry-based robot-manipulation skills
User-friendly virtual reality learning from demonstration setup
During the 2022 AEE Project Work course the students Eetu Suominen, Sampo Vänninen, Emrehan Öz and Nico Renlund developed and built a virtual reality learning from demonstration (LFD) setup in our lab.
Accepted papers!!!
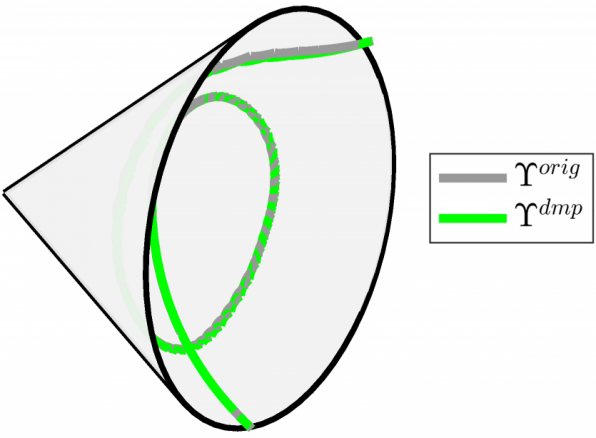
Great news!!! Our paper on “Geometry-aware Dynamic Movement Primitives” got accepted in ICRA2020