Author: Ville Kyrki
ICRA 2023, here we come!

The Intelligent Robotics group will attend to ICRA 2023. Read more!
Bio-mimetic multipoint contact sensing
Tactile sensors have been primarily used to improve the agile manipulation capabilities of the robots. As opposed to previous efforts, the aim of this research is to be able to develop a reproducible and open-source multi-point tactile sensor array. In doing so, we aim to develop a sensor array that can provide an array of […]
Human-inspired navigation for robots
Humans possess the innate ability to navigate from one location to another and orient themselves to avoid getting lost in the process. Studies from rodents and other model species have provided unprecedented insights into the potential neural correlates of mammalian spatial cognition. Yet, those correlates have so far revealed little about applicable principles of navigational […]
Teacher-Learner Interaction for Active Learning Robots
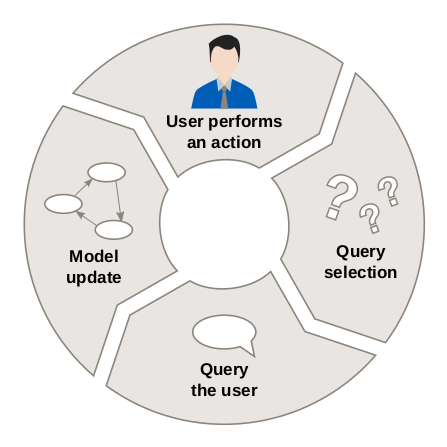
Service robots will be deployed in the future as general assistive devices in dynamic human environments like households, schools and hospitals. In order to be valuable and cost-effective assistants, robots must allow a wide range of customization, especially regarding their skills. As pre-programming robots for every situation is impossible, robots need to gain new skills […]