Author: Shivam Chaubey
Master Thesis on “Learning From Demonstrations (LfDs) for Robotic Manipulators”
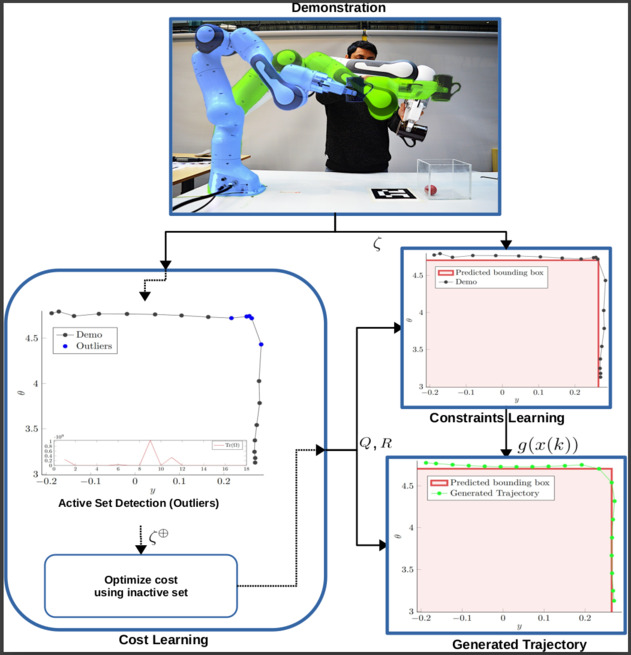
We are currently seeking a motivated and talented master’s student to investigate and improve upon a developed method that learns cost and constraints explicitly as part of their master’s thesis.
Human-in-the-Loop Shared Control with Guaranteed Safety for Teleoperated Robots

In this project, we develop a shared control framework that guarantees safety using control-invariant sets (CISs), which are computed from the robot’s dynamics and an environmental model. The CISs ensure that unsafe human commands are overridden, while safe commands are executed normally.