Month: January 2026
Master Thesis on “Visual segmentation of elevator components with robotic platform”
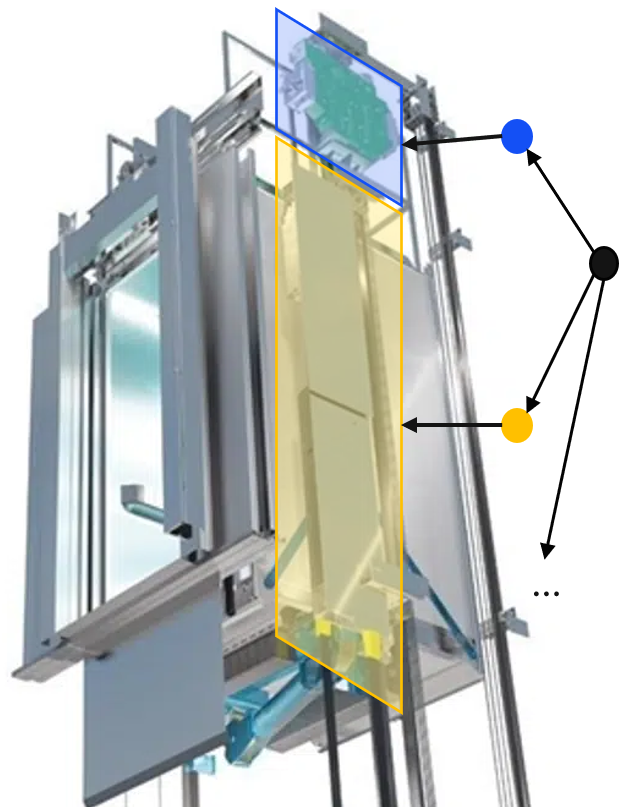
This thesis focuses on developing and evaluating visual segmentation methods for elevator components using a mobile robotic platform.
Master Thesis on “Learning From Demonstrations (LfDs) for Robotic Manipulators”
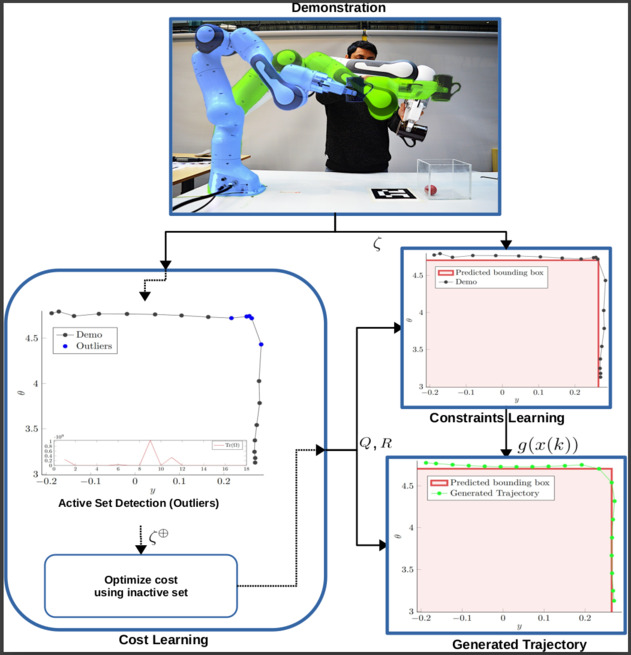
We are currently seeking a motivated and talented master’s student to investigate and improve upon a developed method that learns cost and constraints explicitly as part of their master’s thesis.