Month: October 2025
Master Thesis on “Learning Latent Action Policies for Autonomous Driving”
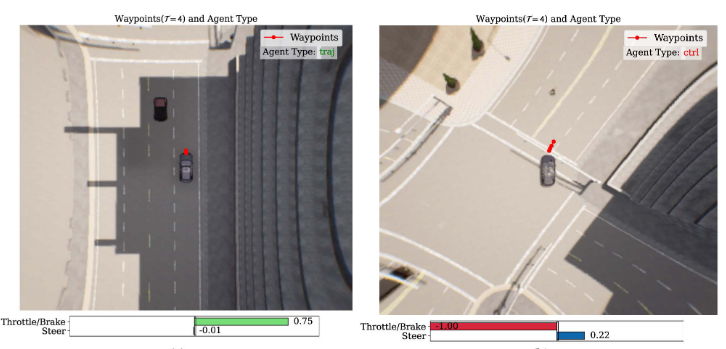
Learning action-conditioned driving dynamics from raw pixels is challenging due to high dimensionality and weak temporal cues. This work combines Latent Action Pretraining (LAPA) with a conditional Diffusion Model to learn discrete latent actions and predict their future evolution. The framework captures multi-modal driving behaviors in latent space, enabling interpretable and data-efficient policy learning for autonomous driving.
Human-in-the-Loop Shared Control with Guaranteed Safety for Teleoperated Robots

In this project, we develop a shared control framework that guarantees safety using control-invariant sets (CISs), which are computed from the robot’s dynamics and an environmental model. The CISs ensure that unsafe human commands are overridden, while safe commands are executed normally.