Month: September 2024
Master Thesis on “Predictive World Models for End-to-End Autonomous Driving”
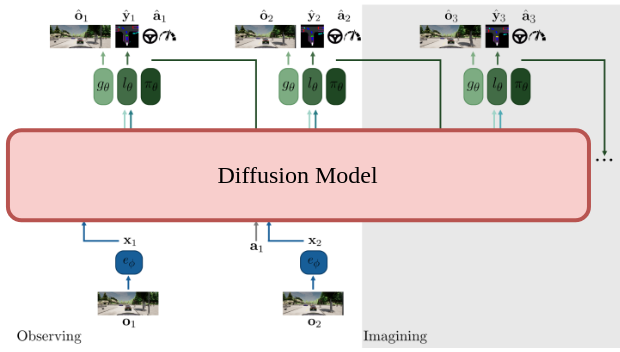
This research aims to explore whether learning and leveraging world models can also be beneficial in visual representation learning for autonomous driving in a closed-loop settings.