Master’s thesis Topic on Analysis of Tactile Signals
Supervisor: Professor Ville Kyrki (ville.kyrki@aalto.fi)
Advisor: Samuli Hynninen (samuli.hynninen@aalto.fi)
The Intelligent Robotics Group is offering a master’s thesis topic for a student interested in robotic perception, signal processing, and machine learning.
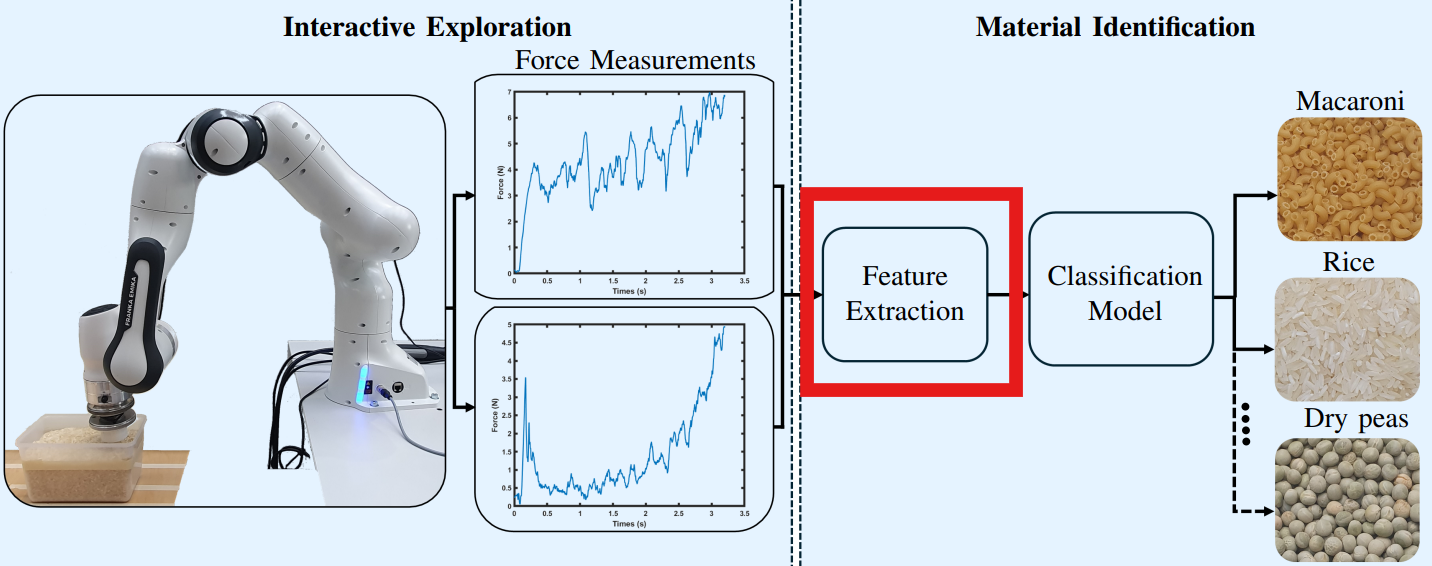
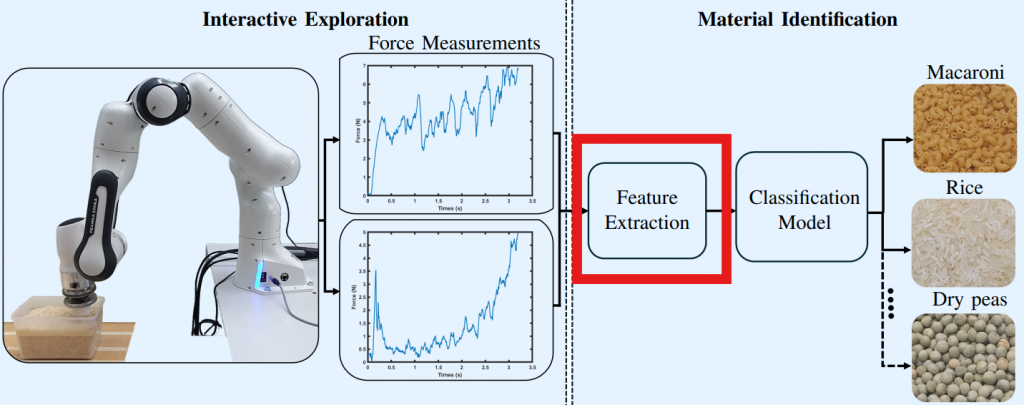
This project builds on earlier work done in the lab, focusing on the analysis of our recent, as-yet unpublished multidimensional force-torque signal dataset. The dataset captures interaction forces between a robot end-effector and a set of materials. The main goal is to identify — or, most likely, learn from data — signalfeatures that can be used to estimate the materials’ physical properties.
As the starting point, the student familiarizes themselves with the physical properties that can be used to characterize the dynamics of granular materials, such as grain size distribution, angle of repose, and friction coefficients. The student identifies what properties can be reliably estimated using available measurement technologies and what can be estimated from the force-torque signals. The student also considers what useful properties to estimate from the perspective of robotics and autonomous work machines.
The student familiarizes themselves with recent literature on deep learning models for similar estimation tasks, where the input is a time series and the output is a regression-type continuous numerical value. Widely adopted time series models, such as [1, 2, 3], may provide inspiration for finding a suitable network architecture for the task at hand. The student conducts experiments to find the best deep learning architecture for the task and reports the results. This stage establishes the deep learning baseline. After establishing the deep learning baseline, it would be interesting to investigate whether adding handcrafted features, for example, by analysing the signals’ Fourier spectrum, can improve the results.
As prerequisites, the student is expected to have basic familiarity with deep learning libraries such as PyTorch, a solid understanding of engineering mathematics, and strong motivation to achieve the highest possible grades in the thesis.
[1] TimesNet: Temporal 2D-Variation Modeling for General Time Series Analysis
[2] Non-stationary Transformers: Exploring the Stationarity in Time Series Forecasting
[3] Informer: Beyond Efficient Transformer for Long Sequence Time-Series Forecasting