Master Thesis on “Predictive World Models for End-to-End Autonomous Driving”
Supervisor: Prof. Ville Kyrki (ville.kyrki@aalto.fi)
Advisor: Dr. Shoaib Azam (shoaib.azam@aalto.fi), Daulet Baimukashev (daulet.baimukashev@aalto.fi)
Keywords: World Model, Diffusion Models, Model-based Imitation Learning, Safe planning
Project Description
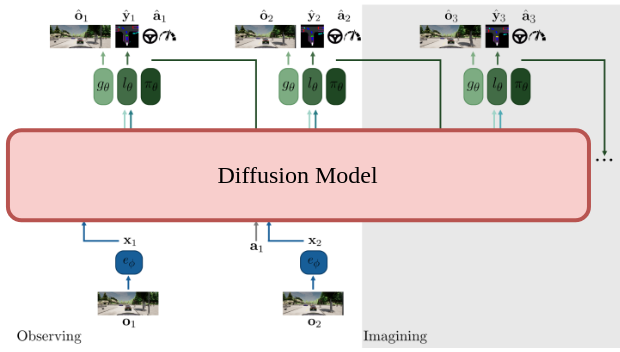
Building efficient representation models is crucial for autonomous driving. These representation models serve as a building block for understanding the environment and are also used to predict the trajectories of the autonomous vehicle. In the literature, different approaches have been developed to represent the environment, but they have limitations in imbuing common sense reasoning into autonomous vehicles. One possible way to address this challenge is to build world models representing the environment.
This research aims to explore whether learning and leveraging world models can also be beneficial in visual representation learning for autonomous driving in a closed-loop settings. For this purpose, in this research CARLA simulator will be used to evaluate the world model representation in predicting the trajectories by developing diffusion-based imitation learning learning models.
Deliverables
- Review of relevant literature
- Developing of world model representation using diffusion models
- Comparison of the implementation with the state-of-the-art methods in closed-loop settings
Practical Information
Pre-requisites: Python(high), Deep Learning (high)
Tools: PyTorch
Simulators: Carla
Datasets: Carla generated datasets, nuScenes
Start: Available immediately
References
- Self-Supervised Learning from Images with a Joint-Embedding Predictive Architecture (https://arxiv.org/abs/2301.08243)
- Learning and Leveraging World Models in Visual Representation Learning (https://arxiv.org/abs/2403.00504)
- World Models for Autonomous Driving: An Initial Survey (https://arxiv.org/abs/2403.02622)
- Model-Based Imitation Learning for Urban Driving(https://arxiv.org/abs/2210.07729)