Master’s Thesis on “Tracking of Environmental Changes Using 3D Scene Graphs”
Supervisor: Dr. Francesco Verdoja (francesco.verdoja@aalto.fi)
Advisor: Phuoc Nguyen (phuoc.nguyen@aalto.fi)
Keywords: Semantic Scene Understanding, Robotic Perception, Mapping
Project Description
Scene understanding is crucial to advance autonomous robotic systems deployment in the real world. Recently, 3D Scene Graphs (3DSGs) have emerged as a promising mapping alternative, offering a rich feature representation while ensuring memory efficiency. Existing applications of 3DSGs are primarily restricted to static environments due to their limited adaptability to a constantly changing world, notably to observations of object movements. This limitation means they cannot deal with situations involving moving objects, such as those hidden inside containers, occluded from view, or that have been relocated.
We are currently looking for a motivated and talented master’s student to join us at the Intelligent Robotics Group at Aalto University. The selected student will focus on developing a framework for constructing 3DSGs capable of recording changes in dynamic environments as they occur.
Deliverables
- Review relevant literature.
- Develop a system to:
- Detect, track and replay scene changes and re-localize object nodes in a 3D scene graph.
- Incorporate observed events into a scalable 3DSG representation
- Experimental results from real robotic data (Hello Robot Stretch 2).
Prerequisites
- Experience with and good understanding of C++ and Python
- Experience with ROS 1 or 2
- Knowledge of these topics is a plus: computer vision, robotic mapping, 3D reconstruction, pose tracking, vision-language models
References
1. Behrens, Tjark, et al. “Lost & found: Tracking changes from egocentric observations in 3d dynamic scene graphs.” IEEE Robotics and Automation Letters (2025). (Tracking and recording geometric changes using 3DSGs)
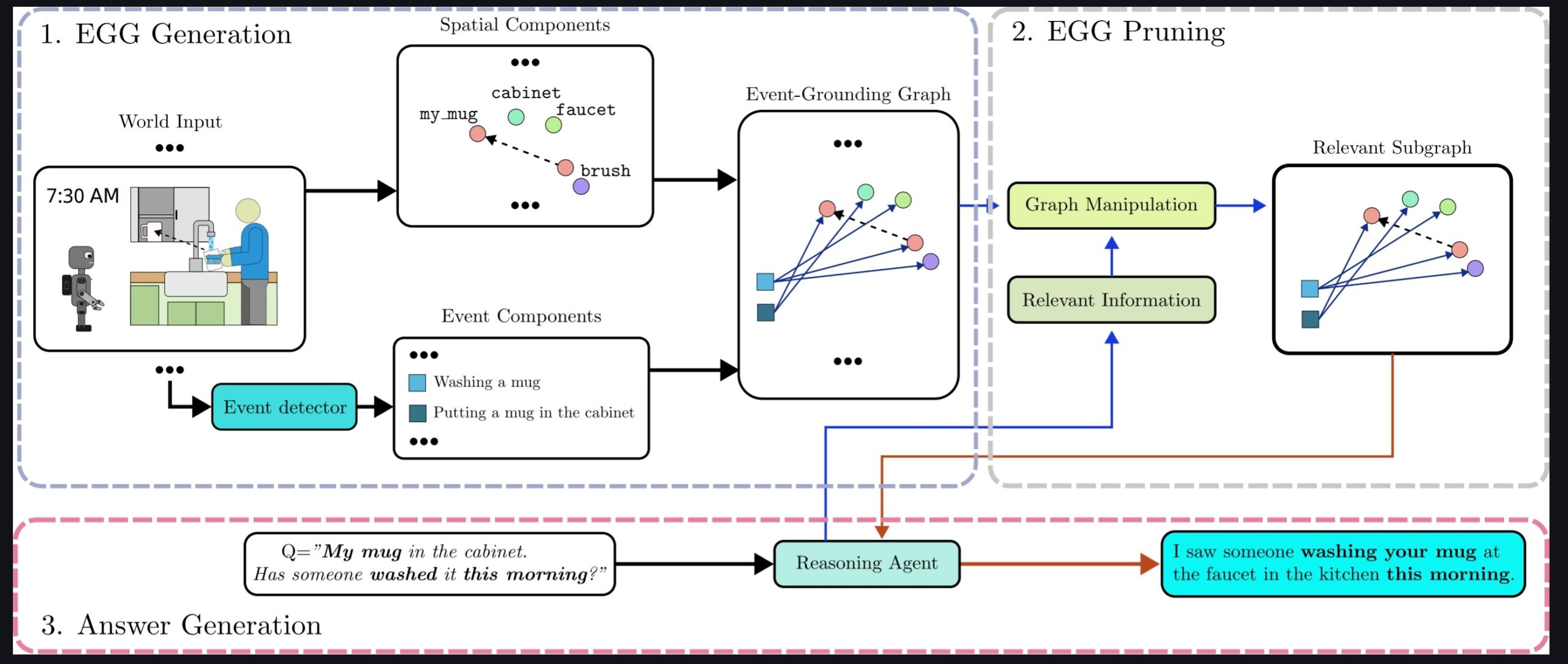
2. Nguyen, Phuoc, Francesco Verdoja, and Ville Kyrki. “Event-Grounding Graph: Unified Spatio-Temporal Scene Graph from Robotic Observations.” arXiv preprint arXiv:2510.18697 (2025). (Incorporate observed events into 3DSGs)
3. Hughes, Nathan, et al. “Foundations of spatial perception for robotics: Hierarchical representations and real-time systems.” The International Journal of Robotics Research 43.10 (2024): 1457-1505. (3DSG construction framework and theoretical backgrounds)